本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/14386.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

C#实战—代码实现收发文件智能化
在信息化的今天,收发电子文档几乎是每个朋友都要经历的事情。比如班级学委和班长需要收发作业,企业管理者需要收发工作文件。但是!!!
每到要交结果时,往往会发现总会有一些人没有即使交上,50个…

带文字海报流程自动化
上一篇文章:
带文字海报流程自动化 - 知乎
项目代码整理在:
https://github.com/liangwq/Chatglm_lora_multi-gpugithub.com/liangwq/Chatglm_lora_multi-gpu 根据用户的输入生成图片prompt模块代码封装:
from openai import OpenAI im…

Photoshop中图像编辑的基本操作
Photoshop中图像编辑的基本操作 Photoshop中调整图像窗口大小Photoshop中辅助工具的使用网格的使用标尺的使用注释工具的使用 Photoshop中置入嵌入式对象Photoshop中图像与画布的调整画布大小的修改画布的旋转图像尺寸的修改 Photoshop中撤销与还原采用快捷键进行撤销与还原采用…

数字文旅重塑旅游发展新生态:以数字化转型为契机,推动旅游产业的创新发展,提升旅游服务的智能化、网络化和个性化水平
目录
一、引言
二、数字化转型推动旅游产业创新发展
1、数字化转型提升旅游产业效率
2、数字化转型拓展旅游产业边界
3、数字化转型促进旅游产业可持续发展
三、提升旅游服务智能化、网络化和个性化水平
1、智能化提升旅游服务体验
2、网络化拓宽旅游服务渠道
3、个性…
OpenCV如何在图像中寻找轮廓(60)
返回:OpenCV系列文章目录(持续更新中......)
上一篇:OpenCV如何模板匹配(59)
下一篇 :OpenCV检测凸包(61) 目标
在本教程中,您将学习如何:
使用 OpenCV 函数 cv::findContours使用 OpenCV 函数 cv::d rawContours …
将要上市的自动驾驶新书《自动驾驶系统开发》中摘录各章片段 1
以下摘录一些章节片段:
1. 概论
自动驾驶系统的认知中有一些模糊的地方,比如自动驾驶系统如何定义的问题,自动驾驶的研发为什么会有那么多的子模块,怎么才算自动驾驶落地等等。本章想先给读者一个概括介绍,了解自动驾…

仿知乎网站问答源码,开源版
仿知乎网站问答源码,开源版 需要一定动手能力 发文章,发视频,发想法,提问回答,注册登录
开发环境
使用技术:springbootthymeleafRedis; 开发环境:tomcat8.0,jdk8.0, ID…
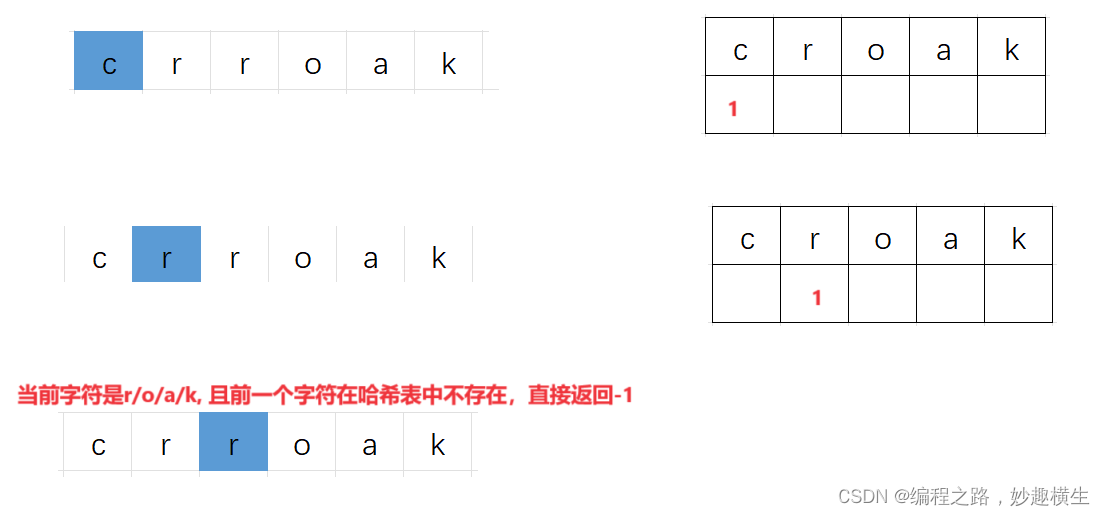
深入理解网络原理3----TCP核心特性介绍(上)【面试高频考点】
文章目录 前言TCP协议段格式一、确认应答【保证可靠性传输的机制】二、超时重传【保证可靠性传输的机制】三、连接管理机制【保证可靠性传输的机制】3.1建立连接(TCP三次握手)---经典面试题3.2断开连接(四次挥手)3.3TCP状态转换 四…
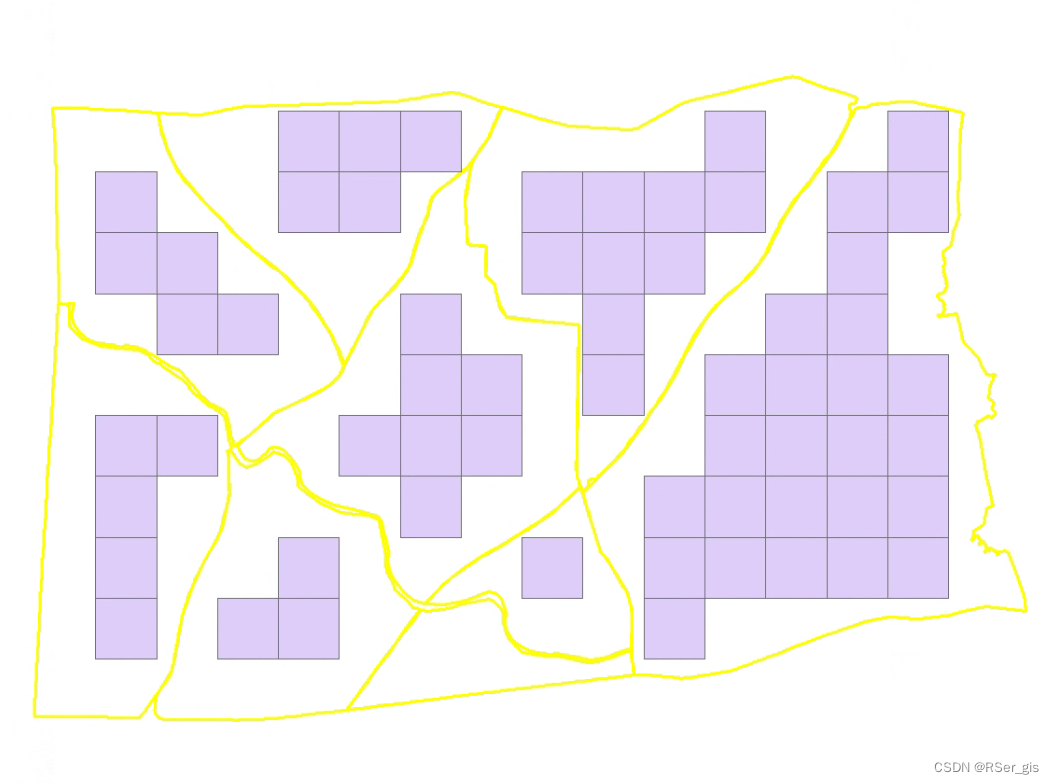
【GDAL应用】基于GDAL实现GIS空间分析--Contains(包含)操作
文章目录 实现效果实现功能实现代码 实现效果
一个渔网数据,一个多边形要素数据: 完全包含多边形要素数据效果: 输出结果: 网格完全位于多边形要素空间范围内:
实现功能
应用两个空间矢量数据进行GIS空间分析–…
![[学习笔记]CyberDog小米机器狗 开发学习](https://img-blog.csdnimg.cn/direct/8abd42e707624edeb84e0ac95664f7c4.png)
[学习笔记]CyberDog小米机器狗 开发学习
1、机器狗本身是UbuntuROS2系统 2、控制机器人只需要了解lcm和Ros topic通讯 3、传感器数据(包括一些imu(/imu)、激光雷达(/scan))会进行topic的一个广播。 仿真环境通信接口: -命令输入(见后续运控说明) 运控lcm数据接口 Motion man…
Find My无人机|苹果Find My技术与无人机结合,智能防丢,全球定位
无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机行业应用,是无…

无人机+交通执法:城市交管系统技术详解
无人机在交通执法中的应用为城市交通系统带来了许多创新和改变。以下是对这一技术应用的详细解析:
1. 违章取证:无人机可以挂载高分辨率和高倍数变焦相机,对城市交通进行空中巡查。尤其在常规监控无法覆盖的盲区,无人机能够实时监…

OpenCV(二)—— 车牌定位
从本篇文章开始我们进入 OpenCV 的 Demo 实战。首先,我们会用接下来的三篇文章介绍车牌识别 Demo。
1、概述
识别图片中的车牌号码需要经过三步:
车牌定位:从整张图片中识别出牌照,主要操作包括对原图进行预处理、把车牌从整图…

IOS 开发 - block 使用详解
1.Blobk的定义
block的写法相对难记,不必司机应被,只需要在xcode里打出"inlineBlock"--回车, 系统会自动帮你把基础版写法给你匹配出来 //Block的基础声明//等号""之前是blobk的声明,等号“”后面是block的实现/*returnType:返回类型(void、int、String *…
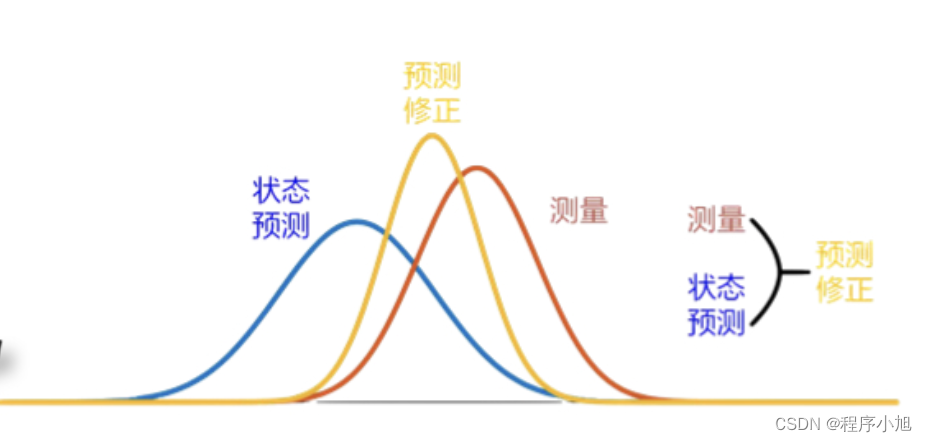
目标跟踪—卡尔曼滤波
目标跟踪—卡尔曼滤波
卡尔曼滤波引入 滤波是将信号中特定波段频率滤除的操作,是抑制和防止干扰的一项重要措施。是根据观察某一随机过程的结果,对另一与之有关的随机过程进行估计的概率理论与方法。 历史上最早考虑的是维纳滤波,后来R.E.卡…

243 基于matlab的模糊C均值算法(FCM)及其改进算法将空间邻域项引入FCM的目标函数(FCM_S)
基于matlab的模糊C均值算法(FCM)及其改进算法将空间邻域项引入FCM的目标函数(FCM_S),广义的模糊C均值(GFCM)算法,基于核的改进的模糊c均值聚类算法(KFCM),基于核的广义模糊c均值聚类算法KGFCM的图像分割方法。程序已调…

uniapp 微信开发工具上访问正常,真机调试一直跨域报错
微信小程序真机调试时,出现跨域问题,需要同时在后端设置多种允许跨域的设置:
// 指定允许其他域名访问
header(Access-Control-Allow-Origin:*);
// 响应类型
header(Access-Control-Allow-Methods:GET,POST,OPTION);
// 响应头设置
header(…
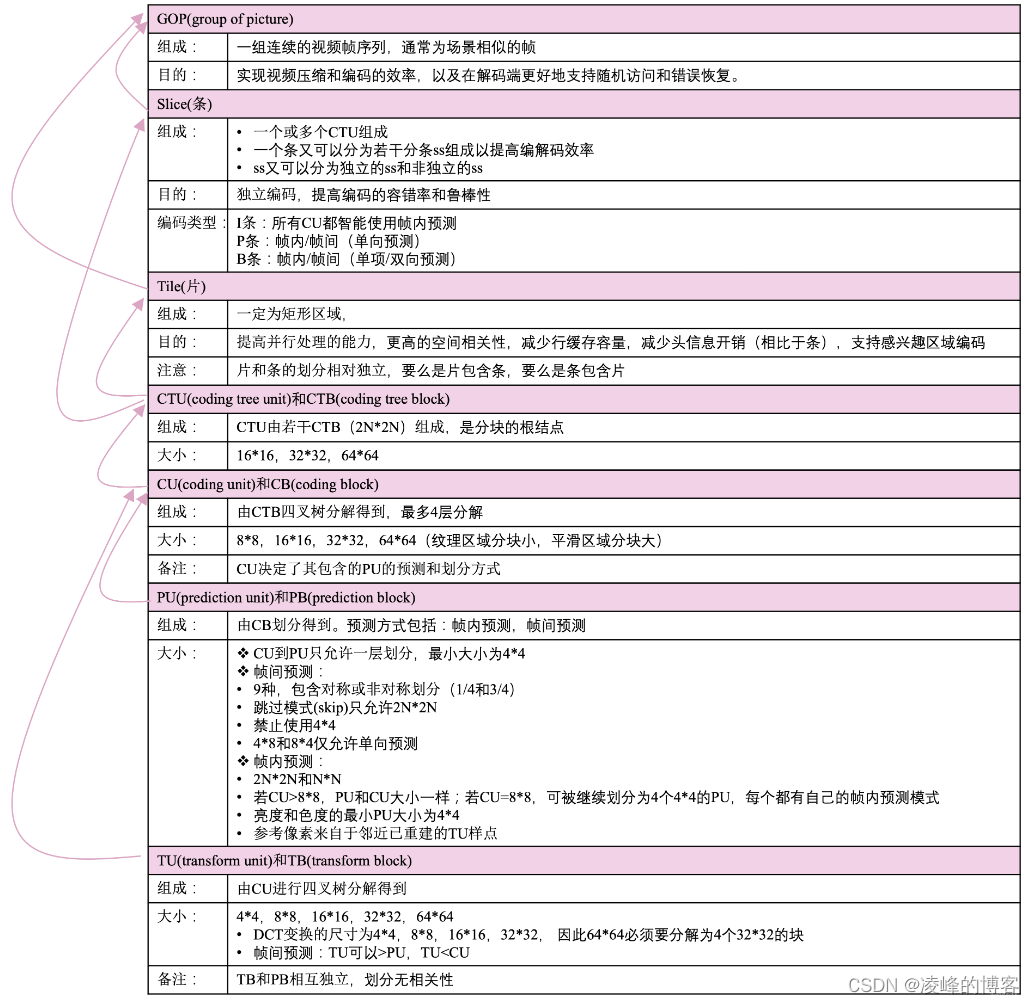
HEVC/H.265视频编解码学习笔记–框架及块划分关系
前言 由于本人在学习视频的过程中,觉得分块单元太多搞不清楚其关系,因此本文着重记录这些分块单元的概念以及关联。
一、框架 视频为一帧一帧的图像,其编码的主要核心是压缩空间以及时间上的冗余。因此,视频编码有帧内预测和帧间…

关于YOLO8学习(三)训练自定义的数据集
前文
关于YOLO8学习(一)环境搭建,官方检测模型部署到手机 关于YOLO8学习(二)数据集收集,处理
简介
本文将会讲解: (1)如何通过PyCharm,进行训练数据,实现人脸检测
开发环境
win10、python 3.11、cmake、pytorch2.0.1+cu117、pycharm、ultralytics==8.0.134 要特…