本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/database/165643.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
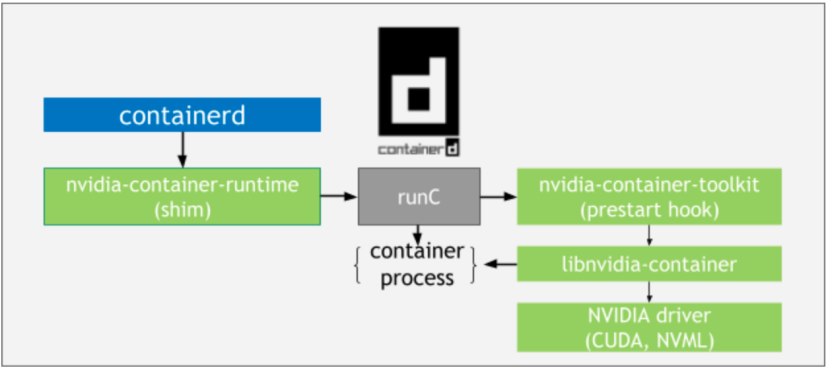
加速AI在k8s上使用GPU卡
加速AI在k8s上使用GPU卡
1. 背景
加速AI任务,在k8s上使用GPU卡
2. 前置条件 k8s集群gpu节点(虚拟机上可以正常使用gpu卡)helm工具3. 架构图
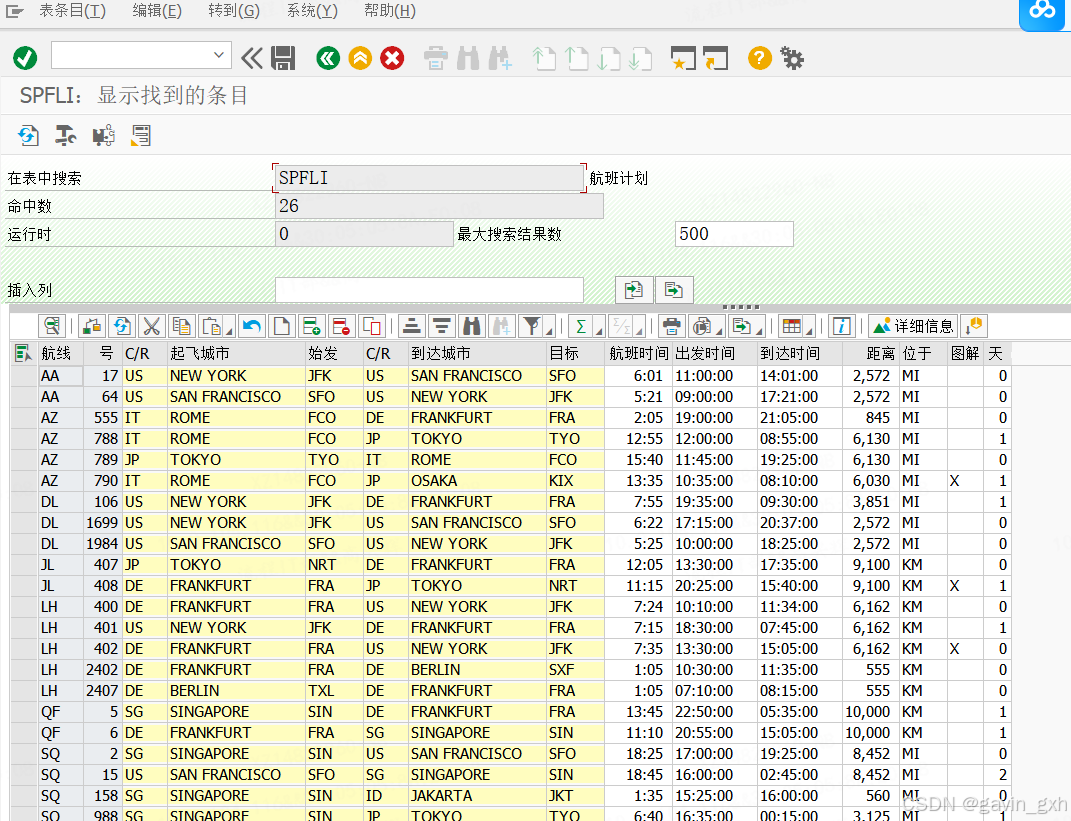
SAP BC 刚初始化 没有数据 SE38 执行 SAPBC_DATA_GENERATOR
解决方案
SE38 执行 SAPBC_DATA_GENERATOR 结束后 好了 有数据可以跑了

大语言模型与多模态模型比较
一、核心差异:输入数据类型与模态融合 输入数据类型 LLM:仅处理文本数据,例如文本分类、机器翻译、问答等任务,通过大规模语料库学习语言规律。 LMM:支持文本、图像、音频、视频等多种模态输入,例如根据图…
猫眼浏览器:简约安全,极速浏览
猫眼浏览器是一款以简约安全为目标的Chrome内核增强版浏览器,基于最新的Chromium开源内核进行二次优化开发。它不仅继承了Chrome浏览器的高速浏览体验,还通过增强的隐私保护设置,让用户远离被追踪和广告的烦恼。无论是日常浏览、信息查询还是…

2025年Ai写PPT工具推荐,这5款Ai工具可以一键生成专业PPT
上个月给客户做产品宣讲时,我对着空白 PPT 页面熬到凌晨一点,光是调整文字排版就改了十几版,最后还是被吐槽 "内容零散没重点"。后来同事分享了几款 ai 写 PPT 工具,试完发现简直打开了新世界的大门 —— 不用手动写大纲…
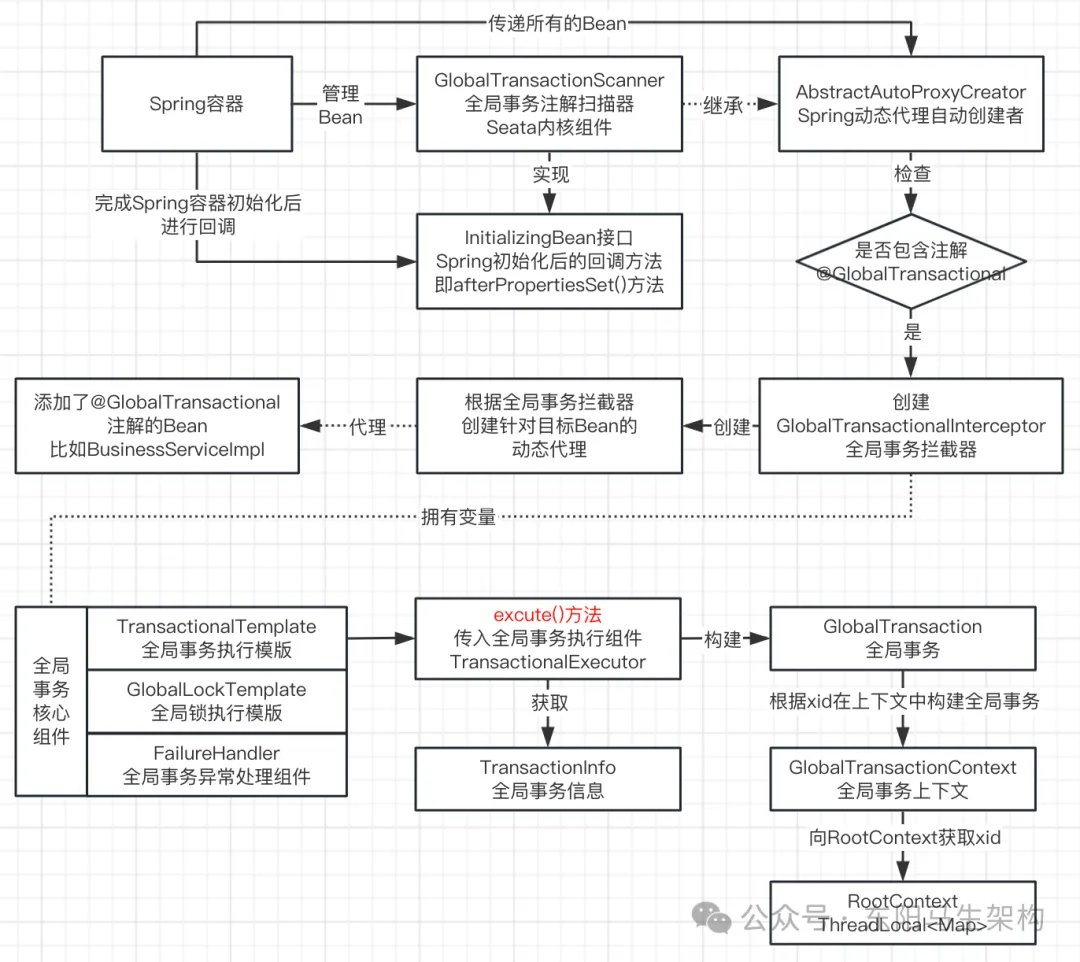
Seata源码—4.全局事务拦截与开启事务处理一
大纲
1.Seata Server的启动入口的源码
2.Seata Server的网络服务器启动的源码
3.全局事务拦截器的核心变量
4.全局事务拦截器的初始化源码
5.全局事务拦截器的AOP切面拦截方法
6.通过全局事务执行模版来执行全局事务
7.获取xid构建全局事务实例与全局事务的传播级别
8.…
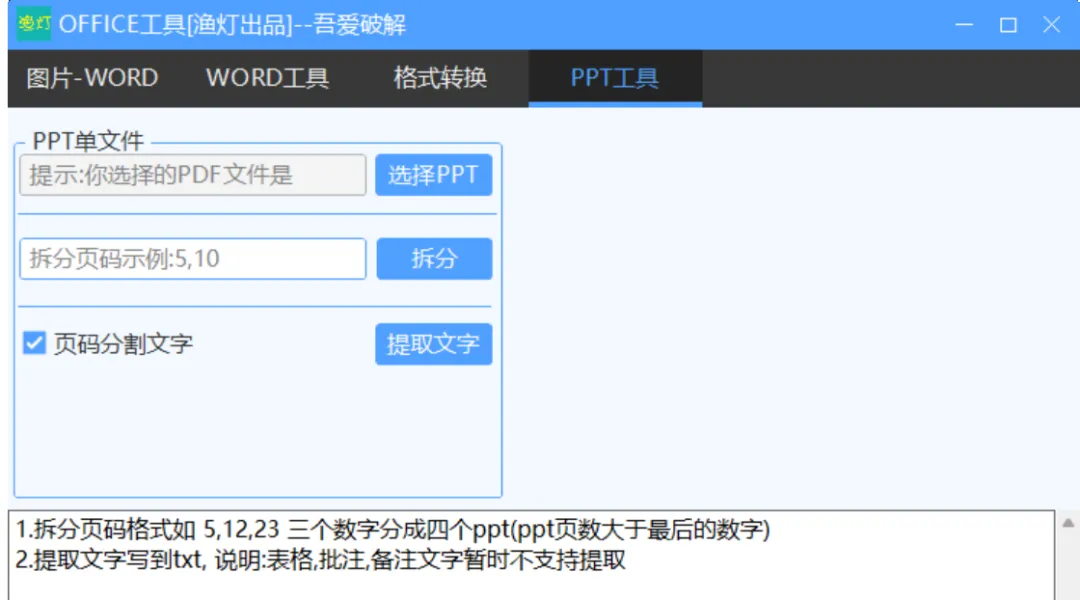
Word图片格式调整与转换工具
软件介绍
本文介绍的这款工具主要用于辅助Word文档处理。 图片排版功能
经常和Word打交道的人或许都有这样的困扰:插入的图片大小各异,排列也参差不齐。若不加以调整,遇到要求严格的领导,可能会让人颇为头疼。
而这款工具能够统…
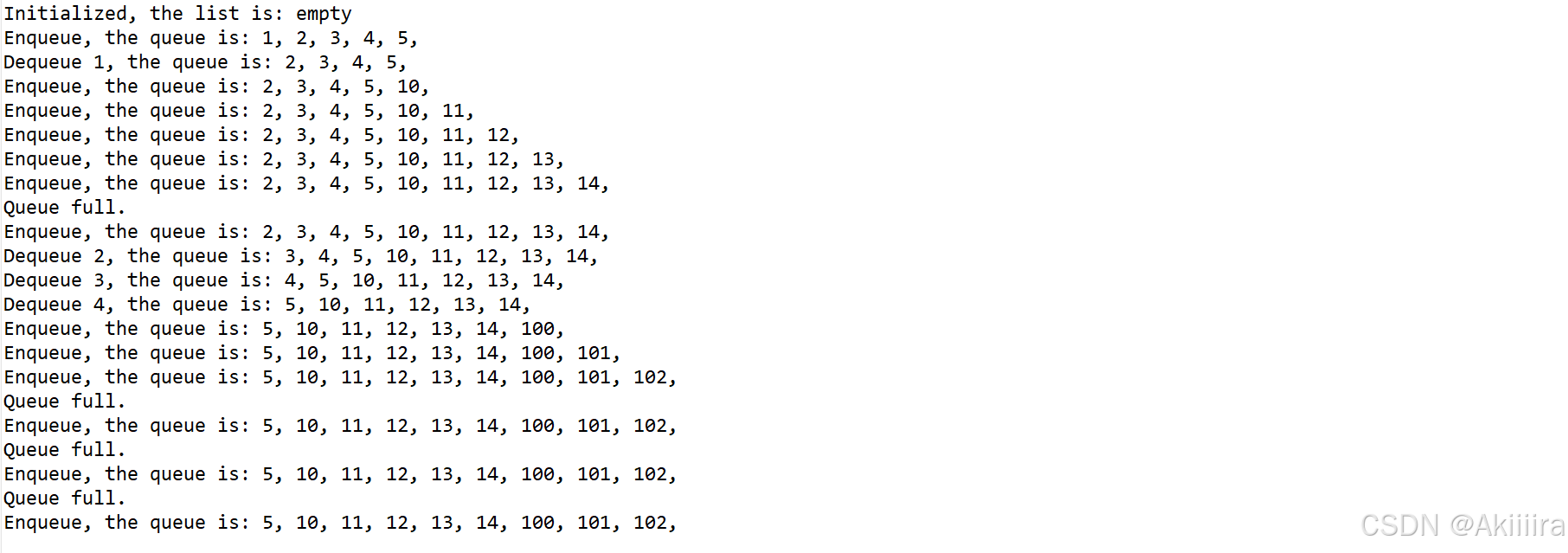
【日撸 Java 三百行】Day 18(循环队列)
目录
Day 18:循环队列
一、关于循环队列
1. 面对顺序表结构的妥协
2. header 与 tail 指针的巧妙设计
二、循环队列的方法
1. 结构定义及遍历
2. 入队
3. 出队
三、代码及测试
拓展:
小结 Day 18:循环队列 Task: 整除…
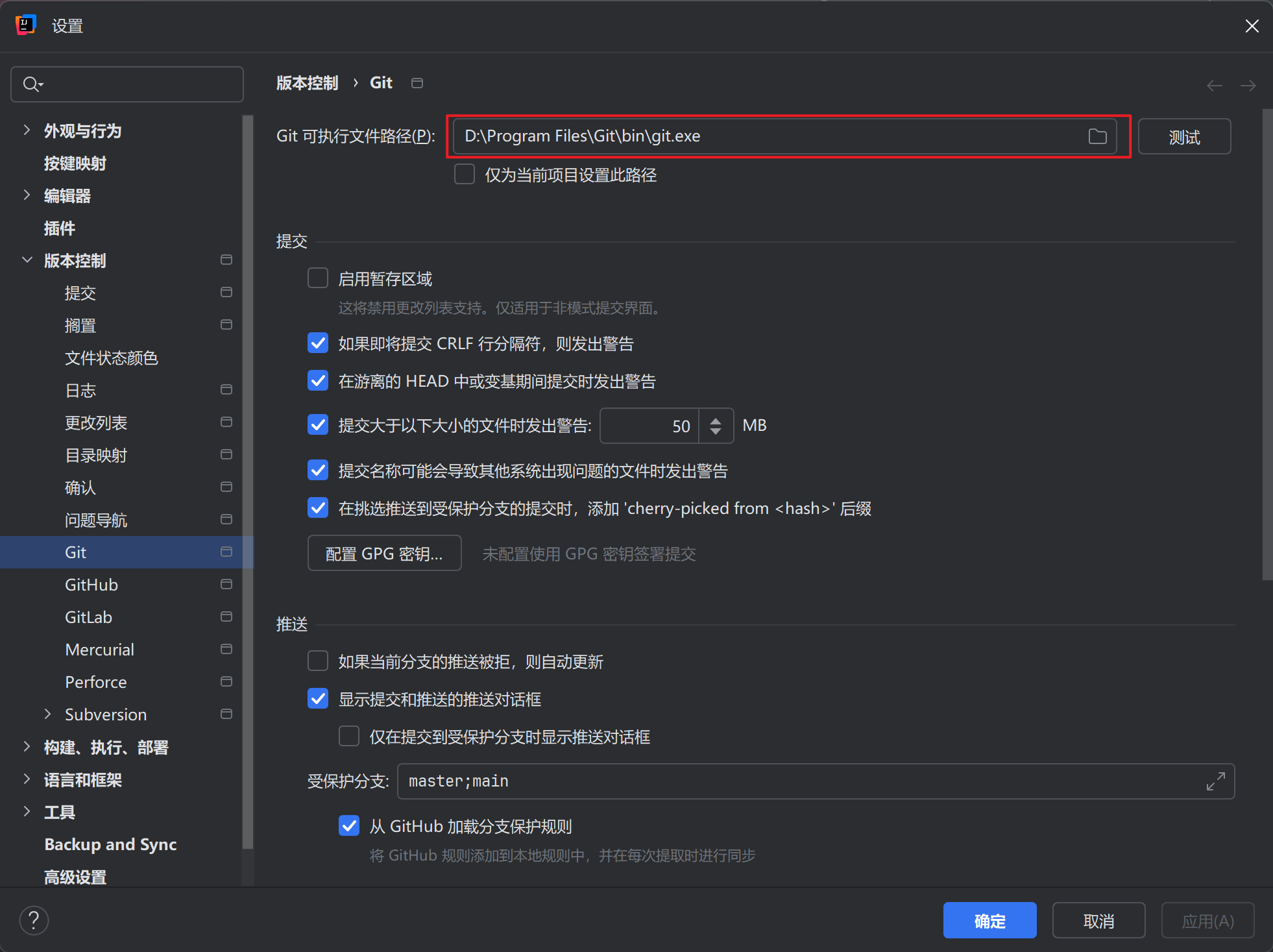
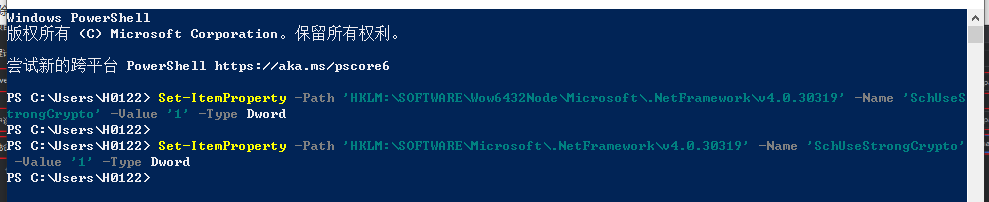
解决IDEA无法运行git的问题
之前git一直没有问题,今天打开就提示我安装git,自然用git去提交新项目也会遇到问题。 我出现问题的原因是:git路径缺失
文件->设置->git 发现git的路径为空,按照实际位置填写即可
新手安装java所有工具(jdk、idea,Maven,数据库)
新手安装JAVA工具 介绍JDK11IDEA 2025.1MavenSQL Server数据库管理工具(Navicat Premium Lite) 介绍
涉及安装JAVA所需的各种工具
JDK(以JDK11为例)IDEA(以2025.1为例)Maven(以3.8.8为例&…

计算机网络 : 网络基础
计算机网络 : 网络基础 目录 计算机网络 : 网络基础引言1. 网络发展背景2. 初始协议2.1 初始协议2.2 协议分层2.2.1 软件分层的好处2.2.2 OSI七层模型2.2.3 TCP/IP五层(四层)模型 2.3 TCP/IP协议2.3.1TCP/IP协议与操作系统的关系&…

实战解析MCP-使用本地的Qwen-2.5模型-AI协议的未来?
文章目录
目录
文章目录
前言
一、MCP是什么?
1.1MCP定义
1.2工作原理
二、为什么要MCP?
2.1 打破碎片化的困局
2.2 实时双向通信,提升交互效率
2.3 提高安全性与数据隐私保护
三、MCP 与 LangChain 的区别
3.1 目标定位不同
3.…

AI数字人融合VR全景:从技术突破到可信场景落地
摘要
本文深度解析AI数字人与VR全景技术融合的技术架构,结合故宫博物院、西门子、强生等真实行业案例,揭示技术落地的关键路径与量化价值。通过具体技术参数、实施细节及权威机构数据,构建可信的技术应用图景,为开发者提供可复用…
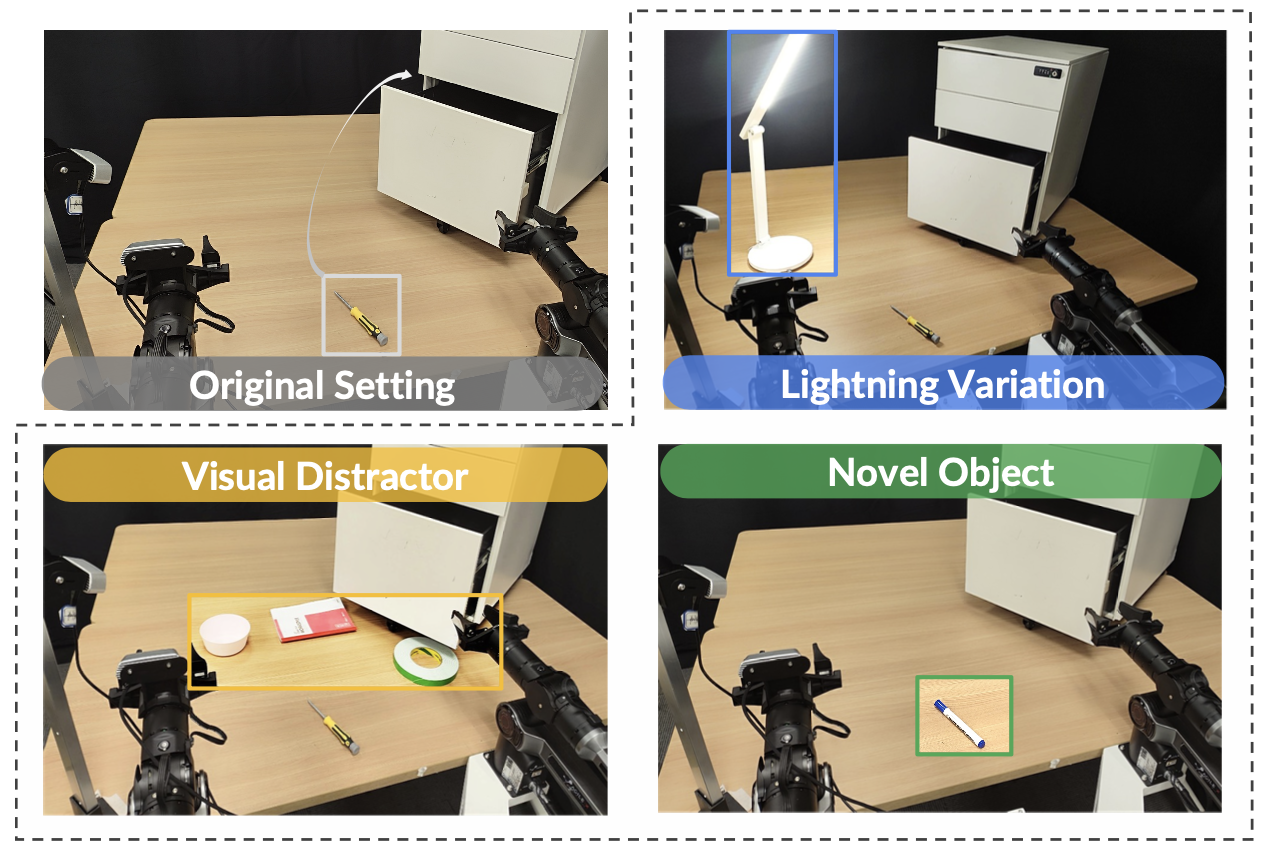
学习以任务为中心的潜动作,随地采取行动
25年5月来自香港大学、OpenDriveLab 和智元机器人的论文“Learning to Act Anywhere with Task-centric Latent Actions”。
通用机器人应该在各种环境中高效运行。然而,大多数现有方法严重依赖于扩展动作标注数据来增强其能力。因此,它们通常局限于单一…
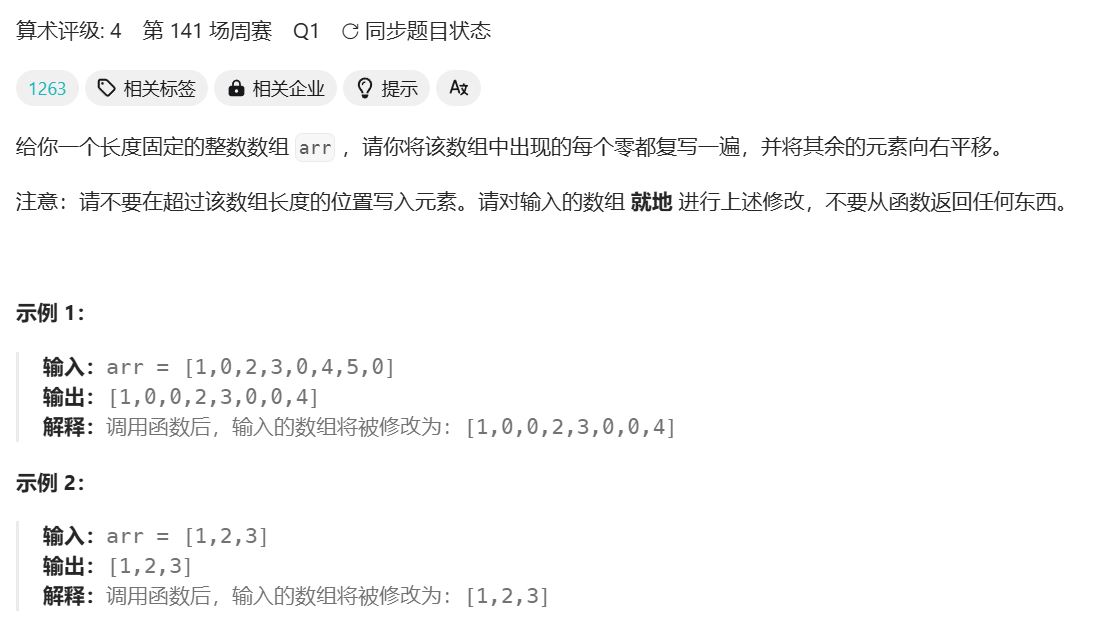
单序列双指针---初阶篇
目录
相向双指针
344. 反转字符串
125. 验证回文串
1750. 删除字符串两端相同字符后的最短长度
2105. 给植物浇水 II
977. 有序数组的平方
658. 找到 K 个最接近的元素
1471. 数组中的 k 个最强值
167. 两数之和 II - 输入有序数组
633. 平方数之和
2824. 统计和小于…

【无标题】联盟聚力 智汇哲讯—无锡数字化服务联盟走进哲讯共话数字化实践
数字化浪潮下的联盟力量
在数字经济高速发展的今天,企业数字化转型已成为不可逆转的趋势。然而,面对技术迭代加速、市场竞争激烈、客户需求多样化等挑战,单一服务商往往难以提供全方位的数字化解决方案。正是在这样的背景下,无锡…
【漫话机器学习系列】255.独立同分布(Independent and Identically Distributed,简称 IID)
深入理解独立同分布(IID):机器学习与统计学的基石
在机器学习、深度学习、统计建模等领域,我们经常会遇到一个重要假设:独立同分布(Independent and Identically Distributed,简称 IID…
TASK02【Datawhale 组队学习】使用 LLM API 开发应用
文章目录 system prompt 和 user prompt高效prompt:用清晰、详尽的语言表达 Prompt原则一:清晰,具体的指令分隔符寻求结构化的输出要求模型检查是否满足条件提供少量示例 "Few-shot" prompting 原则二,给模型时间去思考…
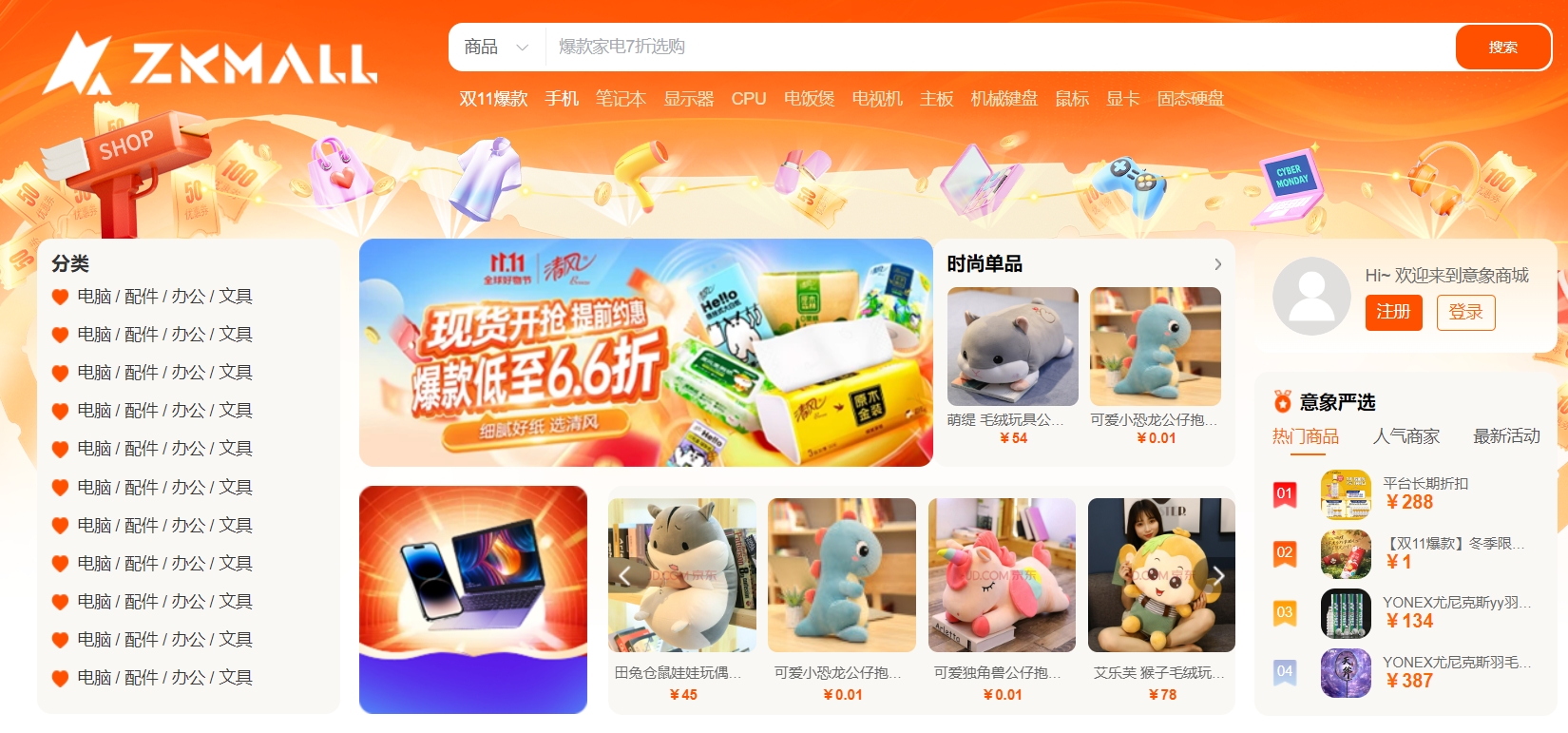
Java + 鸿蒙双引擎:ZKmall开源商城如何定义下一代B2C商城技术标准?
在 B2C 电商领域持续革新的当下,技术架构的优劣成为决定商城竞争力的核心要素。ZKmall开源商城以其创新融合的 Java 与鸿蒙双引擎,为下一代 B2C 商城技术标准勾勒出全新蓝图,在性能、兼容性、拓展性等关键维度实现了重大突破。 一、Java 技术…

ai创作平台下载:AnKo开启智能创作新时代!
ai创作平台下载:AnKo开启智能创作新时代!
在如今内容爆炸的时代,ai创作平台下载成为创作者首选。而ai创作平台下载中的佼佼者,正是AnKo。AnKo是2025年推出的免费AI创作平台,是多模型AI聚合工具平台,为ai创…