本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/182526.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
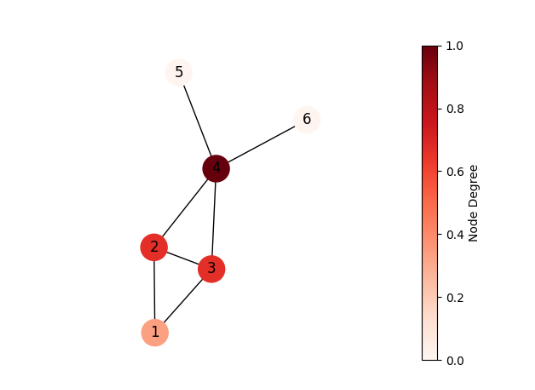
图和图神经网络的可视化,详解与示例
1 图和图神经网络可视化 图和图神经网络(Graph Neural Networks,GNNs)的可视化对于理解和分析复杂图结构和模型的工作非常重要。图和图神经网络(GNN)的可视化是一种强大的工具,用于理解和分析复杂的图结构…
研发效能(DevOps)职业技术认证-第六期开班啦丨IDCF
本证书是由国家工业和信息化部教育与考试中心颁发的职业技术证书,也是国内首个《研发效能(DevOps)工程师职业技术认证》。该《认证》对研发效能(DevOps)工程师的职业技术分为初级、中级、高级三个专业等级。
IDCF社区…
Qt之自定义QStringListModel设置背景色和前景色
一.效果 二.实现
QStringListModel里只实现了Qt::EditRole和Qt::DisplayRole,不能直接设置背景色和前景色,所以我们要继承QStringListModel,重写其中的data和setData方法,使其支持Qt::ForegroundRole和Qt::BackgroundRole。
QHStringListModel.h
#ifndef QHSTRINGLISTMO…
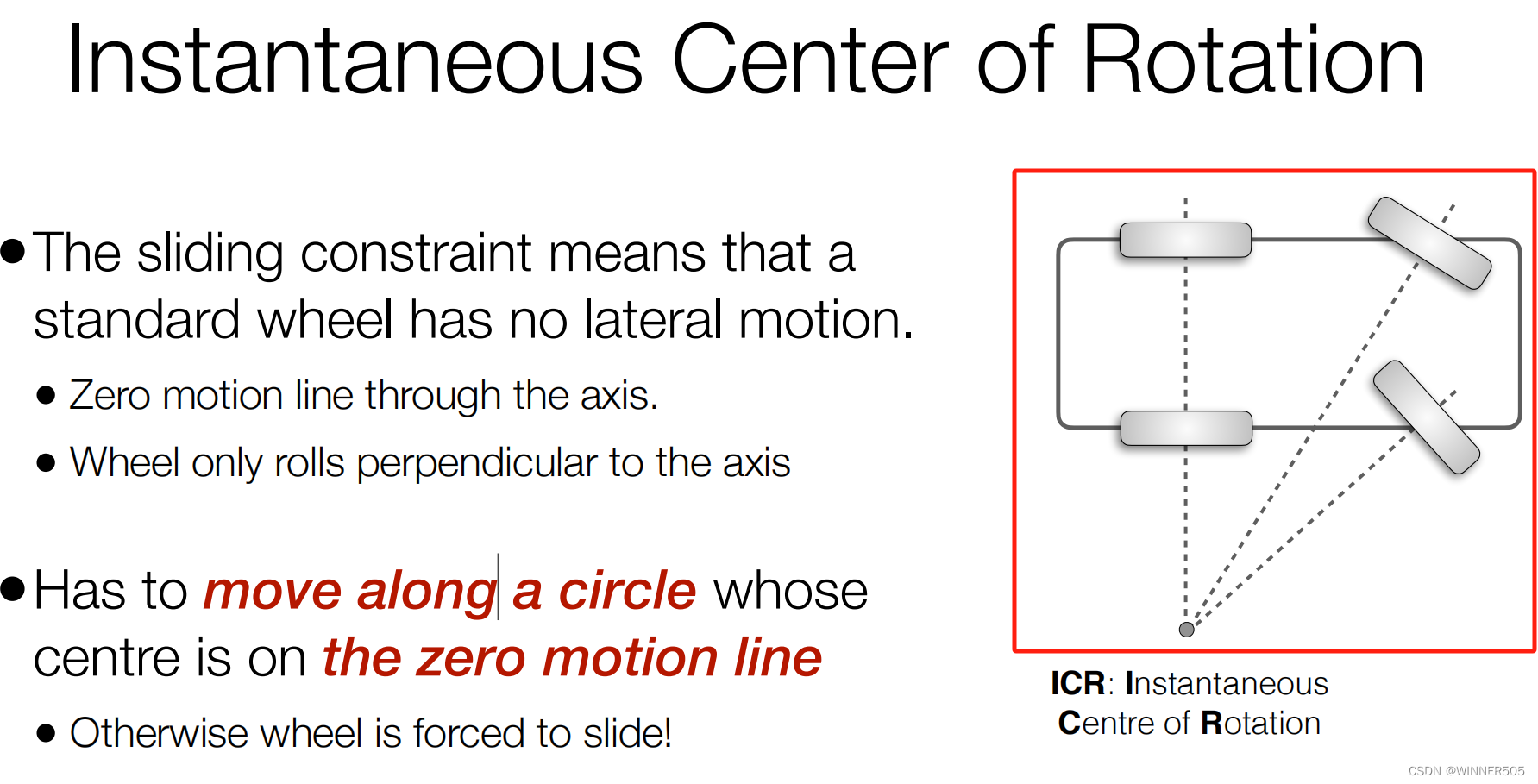
【COMP329 LEC4 Locomotion and Kinematics】
Only for the Test 1 which include 4.2 4.3 4.4 Locomotion and Kinematics 运动和运动学 (4.2) Part 2: Wheeled Motion 1. Wheeled Robots a. 省略控制双腿需要的计算复杂度 b. 只限于easy terrain (地形) c. 不平坦uneven 不规则irregular 的地形需要…
修炼k8s+flink+hdfs+dlink(六:学习namespace,service)
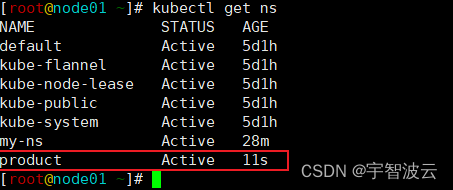
一:什么是namespace?
你可以认为namespaces是你kubernetes集群中的虚拟化集群。在一个Kubernetes集群中可以拥有多个命名空间,它们在逻辑上彼此隔离。 他们可以为您和您的团队提供组织,安全甚至性能方面的帮助!
二&a…

Java JSON字符串转换成JSONArray对象,遍历JSONArray
JSON字符串转换成JSONArray对象,遍历JSONArray:
// 一个未转化的字符串
String str "[{name:a,value:aa},{name:b,value:bb},{name:c,value:cc},{name:d,value:dd}]" ;// 首先把字符串转成 JSONArray 对象
JSONArray jsonArray JSONArray.p…

Spring Authorization Server 1.1 扩展 OAuth2 密码模式与 Spring Cloud Gateway 整合实战
目录 前言无图无真相创建数据库授权服务器maven 依赖application.yml授权服务器配置AuthorizationServierConfigDefaultSecutiryConfig 密码模式扩展PasswordAuthenticationTokenPasswordAuthenticationConverterPasswordAuthenticationProvider JWT 自定义字段自定义认证响应认…

机器学习-模型评估与选择
文章目录 评估方法留出法交叉验证自助法 性能的衡量回归问题分类问题查准率、查全率与F1ROC与AUC 在机器学习中,我们通常面临两个主要问题:欠拟合和过拟合。欠拟合指模型无法在训练数据上获得足够低的误差,通常是因为模型太简单,无…
升级 Xcode 15模拟器 iOS 17.0 Simulator(21A328) 下载失败
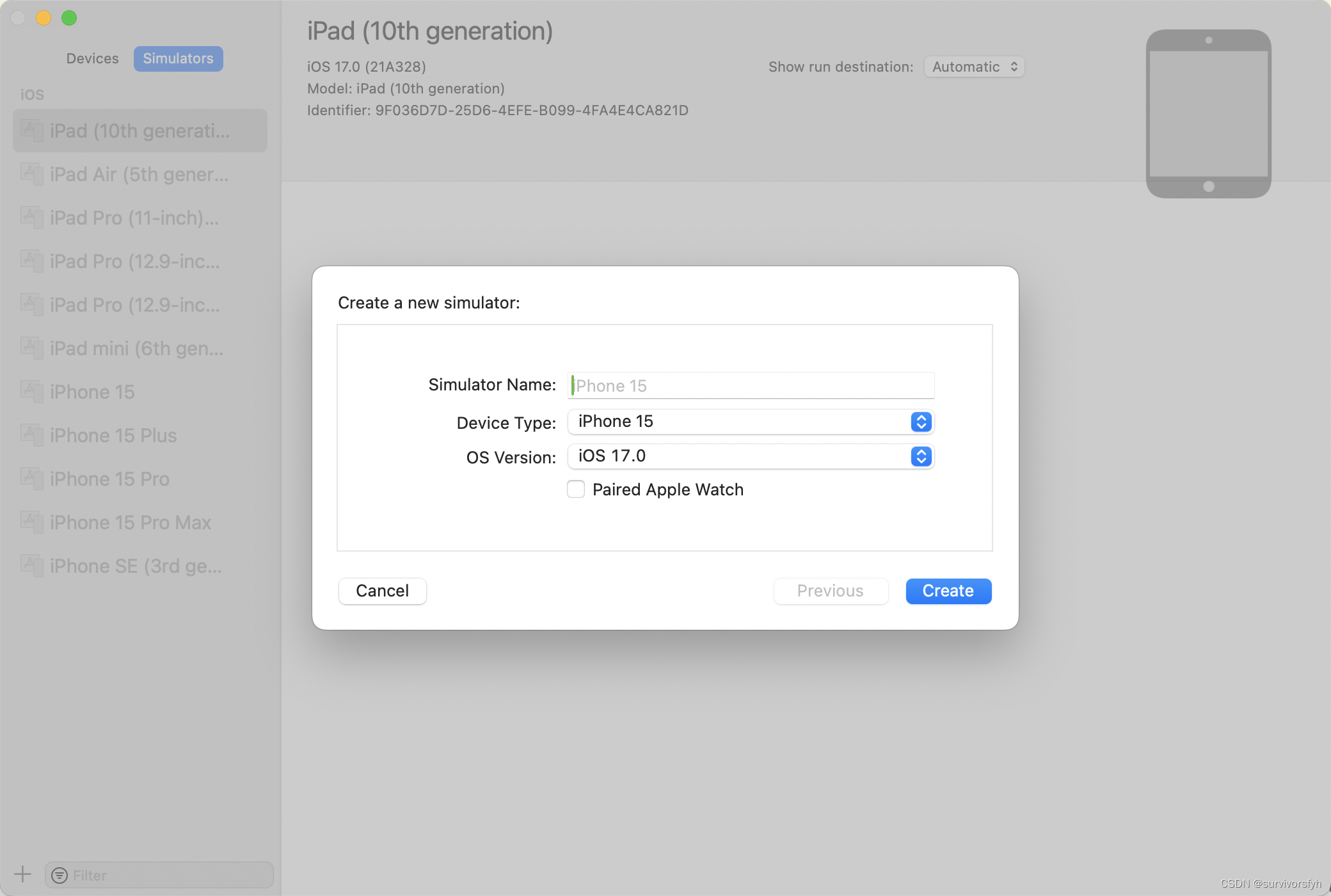
升级 IDE Xcode 15 后本地模拟器 Simulator 全被清空,反复重新尝试 Get 下载频频因网络异常断开而导致失败 ... 注:通过 Get 方式下载一定要保证当前网络环境足够平稳,网络环境不好的情况下该方法几乎成不了 解决办法
Get 方式行不通可以尝试通过 官网 途径先下载 模拟器安装包…
论文解读:Large Language Models as Analogical Reasoners
一、动机
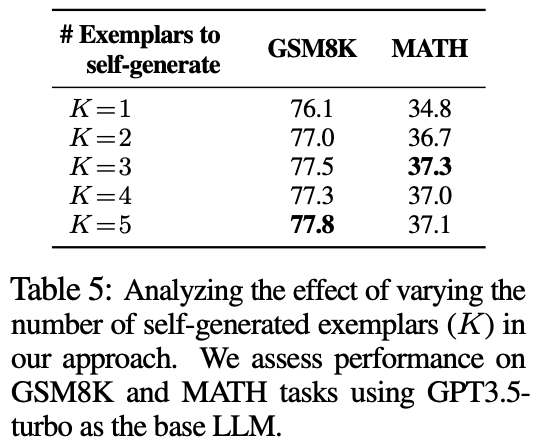
大模型在各种类型的NLP任务上均展现出惊艳的表现。基于CoT propmt能够更好地激发大模型解决复杂推理问题的能力,例如解决数学解题,可以让模型生成reasoning path。现有的经典的CoT方法有few-shot cot、zero-shot cot等。然后现有的cot面临两个…

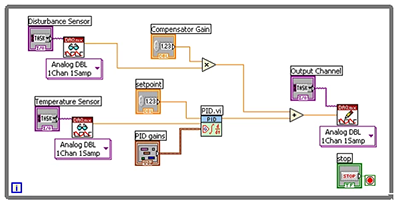
LabVIEW中PID控制的的高级功能
LabVIEW中PID控制的的高级功能
比例-积分-微分(PID)控制占当今控制和自动化应用的90%以上,主要是因为它是一种有效且简单的解决方案。虽然PID算法最初用于线性、时不变系统,但现在已经发展到控制具有复杂动力学的系统。在现实世界…
开启生成式AI的探索之旅,亚马逊云科技分享生成式AI热门案例
现今,生成式AI为企业争先讨论的热门话题,上云出海为企业转型的重中之重。无论你是行业新贵还是中小企业,探索新的模式、创新迭代业务都是不容忽视的重点,下面就来介绍几个亚马逊云科技帮助企业创新的案例。 开启生成式AI的探索之旅…
C算法:输入一个数n,输出1到n之间所有的质数
需求:
写一个函数,输入一个数n,输出1到n之间所有的质数。(注:质数又称素数。一个大于1的自然数,除了1和它自身外,不能被其他自然数整除的数叫做质数。)
输入样例:
10 …
2017年亚太杯APMCM数学建模大赛A题睡眠对人体的影响求解全过程文档及程序
2017年亚太杯APMCM数学建模大赛
A题 睡眠对人体的影响
原题再现 自2001年以来,世界睡眠医学协会将每年的3月21日定为世界睡眠日,以引起人们对睡眠的重要性和质量的关注。 一整天的精神状态取决于昨晚的睡眠质量,高睡眠质量自然保证了人们精…
vscode不显示横滚动条处理
最近发现vscode打开本地文件不显示水平的滚动条,但是打开一个临时文件是有水平滚动条的。 解决方案 可以一个个试 vscode配置
左下角设置–设置–搜索Scrollbar: Horizontal
auto 自动visible 一直展示hidden 一直隐藏
拖动底部状态栏 发现是有的,但是…
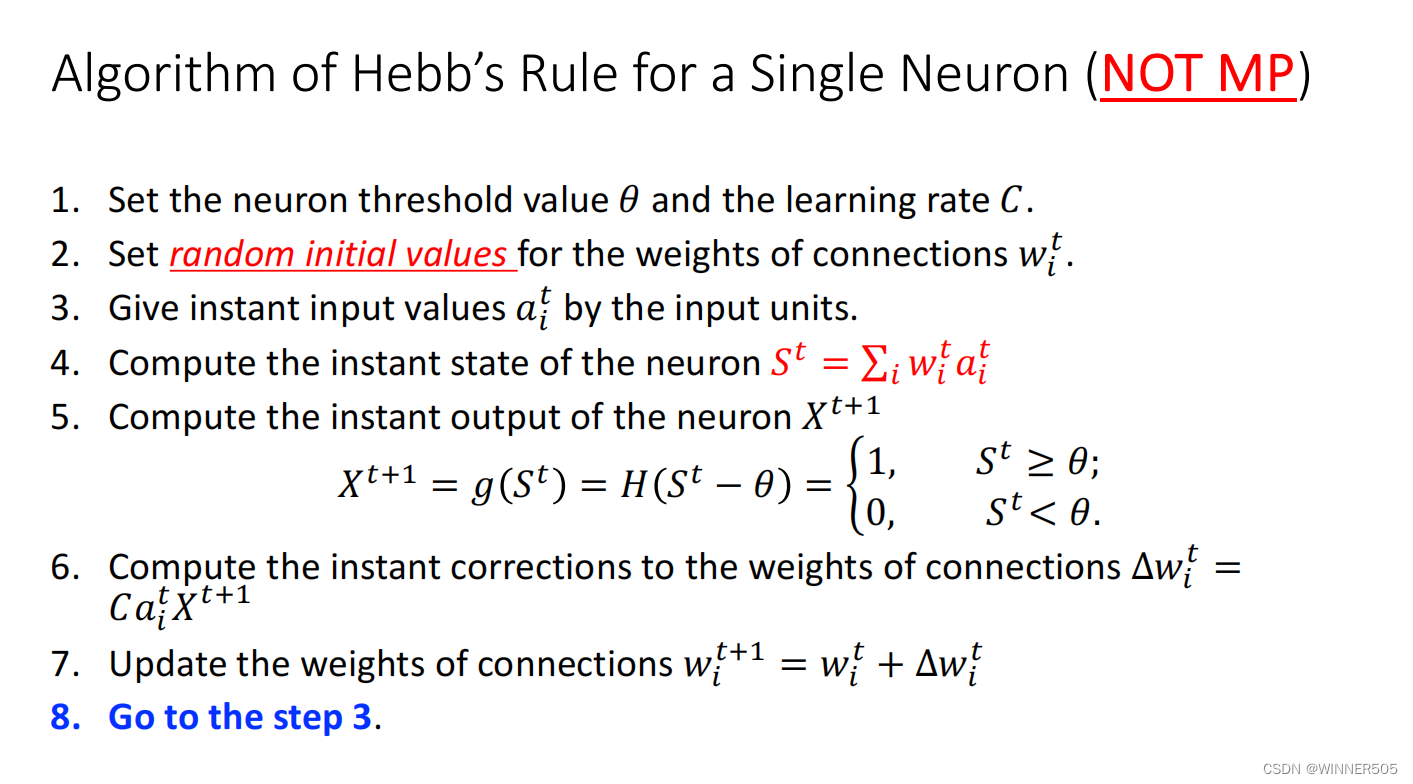
【COMP305 LEC 8】
LEC 8 Comp305 Part I. Artificial Neural Networks Topic 3. Hebb’s Rules
1. Hebb’s Rules and the historical background The McColloch-Pitts neuron made a base for a machine (network of units) capable of 1. storing information and 2. producing logical…
《语音优先》智能语音技术驱动的交互界面设计与语音机器人设计(译者序)...
“言为心声,语为心境”,语言与对话是我们沟通与协作的重要方式。而智能语音技术是一种基于人工智能和自然语言处理技术的语音交互技术。它可以通过语音识别技术将用户的语音指令转换为文本,然后通过自然语言处理技术对文本进行分析和理解,最终…