本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/185505.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

初步认识 Web Components 并实现一个按钮
目录
1.Web Components 基本概念
1.1 三个场景
1.2 是什么
2.使用 Custom Elements 实现一个按钮
2.1 概念介绍
2.1.1 Shadow DOM
2.1.2 Element.attachShadow()
2.1.3 在组件中 使用 Shadow DOM 基本步骤
2.1.4 attributeChangedCallback
2.1.5 get observedAttribu…
![单目3D目标检测[基于深度辅助篇]](https://img-blog.csdnimg.cn/d525c0bc93284695aa8c78cf1e9e521a.png)
单目3D目标检测[基于深度辅助篇]
基于深度辅助的方法
1. Pseudo-LiDAR
Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving康奈尔大学https://zhuanlan.zhihu.com/p/52803631 首先利用DRON或PSMNET从单目 (Monocular)或双目 (Stereo)图像获取对应的…
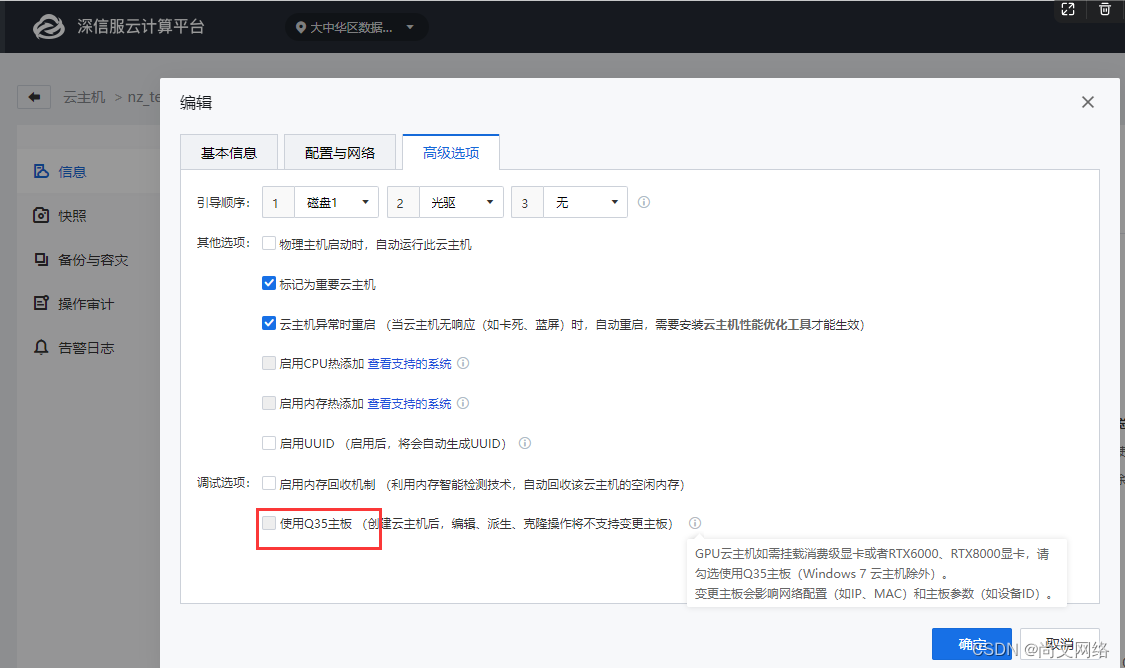
KVM之QEMU Q35仿真程序-尚文网络xUP楠哥
~~全文共1106字,阅读需约5分钟。 进Q群11372462领取专属报名福利 !
# 说在前面
众所周知,KVM 虚拟化也被成为云计算平台的云底座,想要学习例如开源 OpenStack 或者国内云计算产品解决方案是需要先学习 KVM 虚拟化知识的…
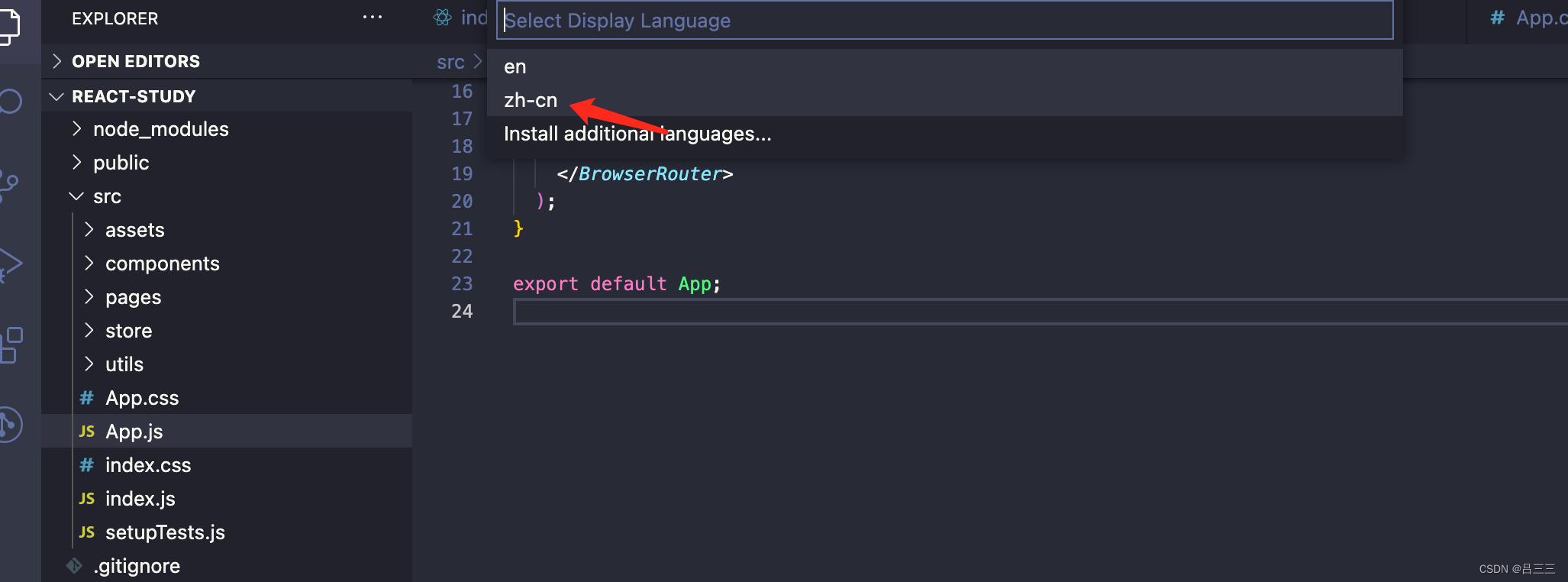
VSCode汉化设置
扩展中搜索并安装 Chinese… 快捷键 commandshiftp,输入框中输入config,选择Config Display Language 选择zh-cn,重启vscode

景联文科技提供4D-BEV标注工具:提升自动驾驶感知能力的精准数据支持
4D-BEV标注是一种用于自动驾驶领域的数据标注方法。在3D空间的基础上,加入了时间维度,形成了四个维度。这种方法通过精准地跟踪和记录动态对象(如车辆、行人)的运动轨迹、姿势变化以及速度等信息,全面理解和分析动态对…

易点易动:引入二维码和移动技术,助力企业高效进行固定资产盘点
固定资产是企业重要的财务资源,而高效准确地进行海量固定资产盘点一直是企业管理的挑战。为了解决这一问题,易点易动固定资产管理系统引入了先进的二维码和移动技术。本文将详细介绍易点易动固定资产管理系统的二维码和移动技术,展示如何借助…
内网渗透-内网信息收集
内网信息收集 前言
当我们进行外网信息收集,漏洞探测以及漏洞利用后,获得了主机的权限后,我们需要扩大渗透的战果时,这是我们就要进行内网的渗透了,内网渗透最重要的还是前期的信息收集的操作了,就是我们的…

Java工具库——FastJson的40个常用方法
那些想看却没看的书,在心里摆满一个图书馆…
工具类介绍 阿里巴巴的 FastJSON,也被称为 Alibaba FastJSON 或阿里巴巴 JSON,是一个高性能的 Java JSON 处理库,用于在 Java 应用程序中解析和生成 JSON 数据。FastJSON 以其卓越的性…
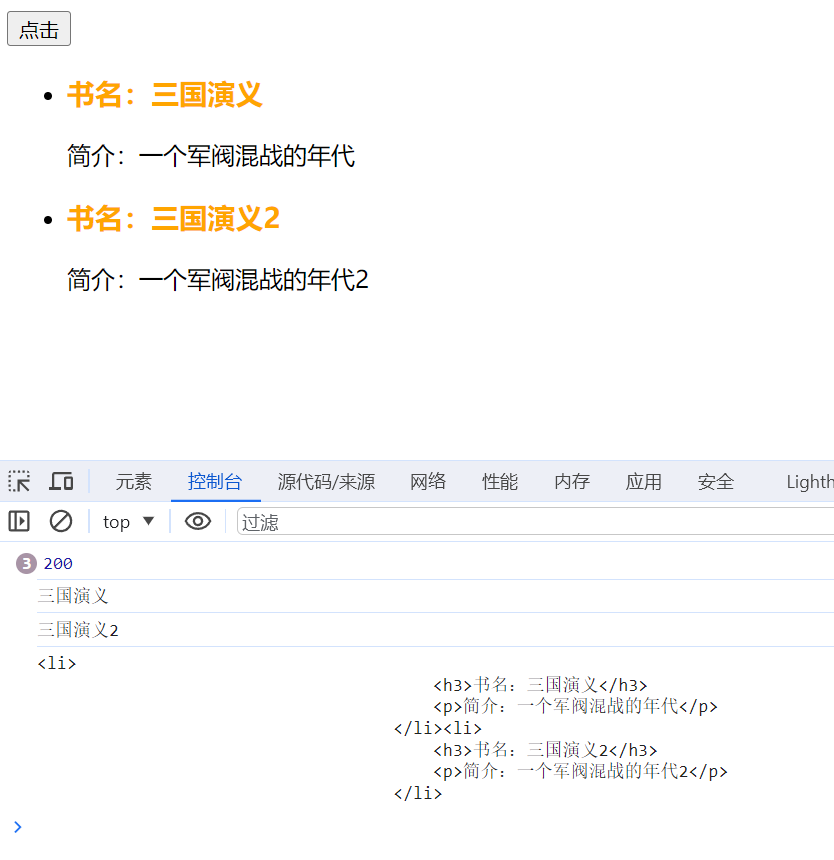
*Django中的Ajax 纯js的书写样式1
搭建项目
建立一个Djano项目,建立一个app,建立路径,视图函数大多为render,
Ajax的创建
urls.py
path(index/,views.index),
path(index2/,views.index2),
views.py
def index(request):return render(request,01.html)
def index2(requ…
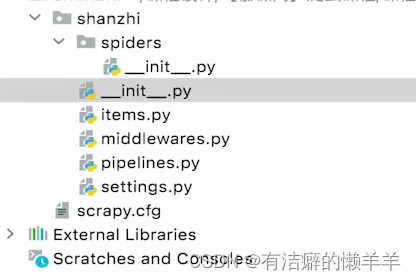
爬虫进阶-反爬破解8(反爬的实战练习:爬虫文件的解析和数据的抓取+反爬措施的分析和突破+Scrapy接入Cookie池管理系统+分布式爬虫的架设)
目录
一、爬虫文件的解析和数据的抓取
(一)项目的知识点
(二)实践操作:新建项目抓取数据
(三)总结
二、反爬措施的分析和突破
(一)项目知识点补充
(二…

python自动化测试(二):xpath获取元素
目录
前置代码
一、什么是xpath方式
二、通过xpath 单组属性名属性值 的方式进行元素定位
三、通过xpath的多组属性进行元素的定位
四、通过xpath文本值的方式进行元素定位
五、通过模糊的文本值方式进行元素定位 前置代码
# codingutf-8
from selenium import webdrive…
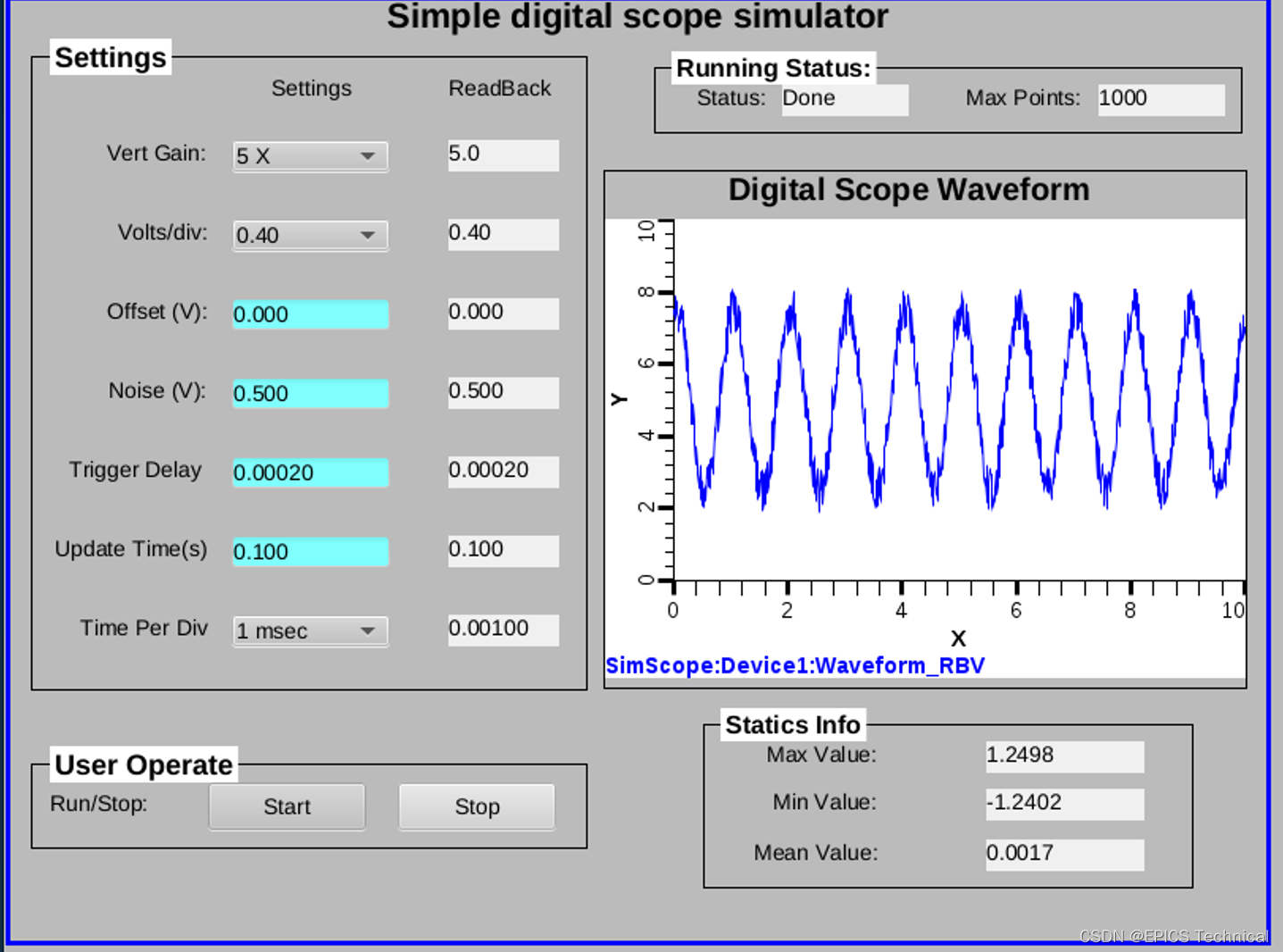
仿真数字正弦波发生器程序
1)构建这个IOC程序的程序框架:
orangepiorangepi5:/usr/local/EPICS/program/simScope$ ls
bin configure db dbd iocBoot lib Makefile simScopeApp2)修改configure下RELEASE文件,添加所需的支持模块,此IOC程…

生成式人工智能在软件开发过程现代化中的作用
集成人工智能的独特功能可以在软件开发生命周期(SDLC)的每个阶段为开发人员提供帮助,从业务需求分析和创建敏捷的用户故事到软件设计、编码、测试、部署、监控和维护。这是组织可以使用生成式人工智能进行优化的地方。 近年来,软件工程见证了向增强自动化…

2023年【北京市安全员-A证】考试及北京市安全员-A证考试内容
题库来源:安全生产模拟考试一点通公众号小程序
北京市安全员-A证考试根据新北京市安全员-A证考试大纲要求,安全生产模拟考试一点通将北京市安全员-A证模拟考试试题进行汇编,组成一套北京市安全员-A证全真模拟考试试题,学员可通过…

ElasticSearch安装、插件介绍及Kibana的安装与使用详解
ElasticSearch安装、插件介绍及Kibana的安装与使用详解
1.安装 ElasticSearch
1.1 安装 JDK 环境
因为 ElasticSearch 是用 Java 语言编写的,所以必须安装 JDK 的环境,并且是 JDK 1.8 以上,具体操作步骤自行百度
安装完成查看 java 版本 …
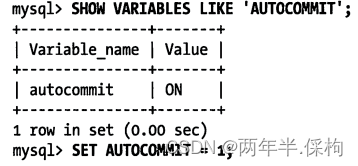
(一)MySQL-架构
一、MySQL逻辑架构 中间是MySQL的核心服务,包括查询分析、优化、缓存及所有的内置函数(日期、时间、数据等),所有跨存储的引擎的功能都在这一层实现:存储过程、触发器、视图等。 存储引擎负责MySQL中的存储和提取。服务器通过A…

【C语言基础】函数的参数是指针
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…
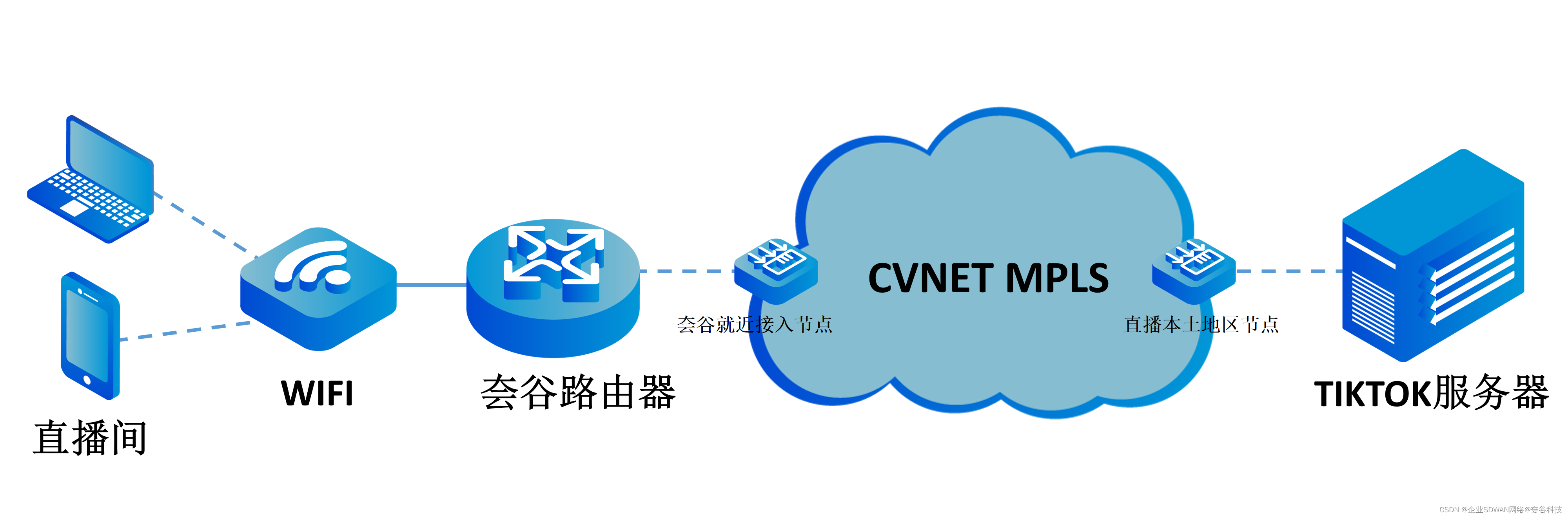
如何满足TIKTOK直播企业四大网络需求,轻松实现直播无卡顿?
说到企业海外直播,大家脑海里一下就想会想到当下爆火的TIKTOK平台,而随着TIKTOK在全球范围大面积铺开推广,不同国家不同市场的活跃用户数纷纷上涨,让更多的电商企业选择在TIKTOK上进行布局获得商机。 对于已布局TIKTOK直播或者待布…
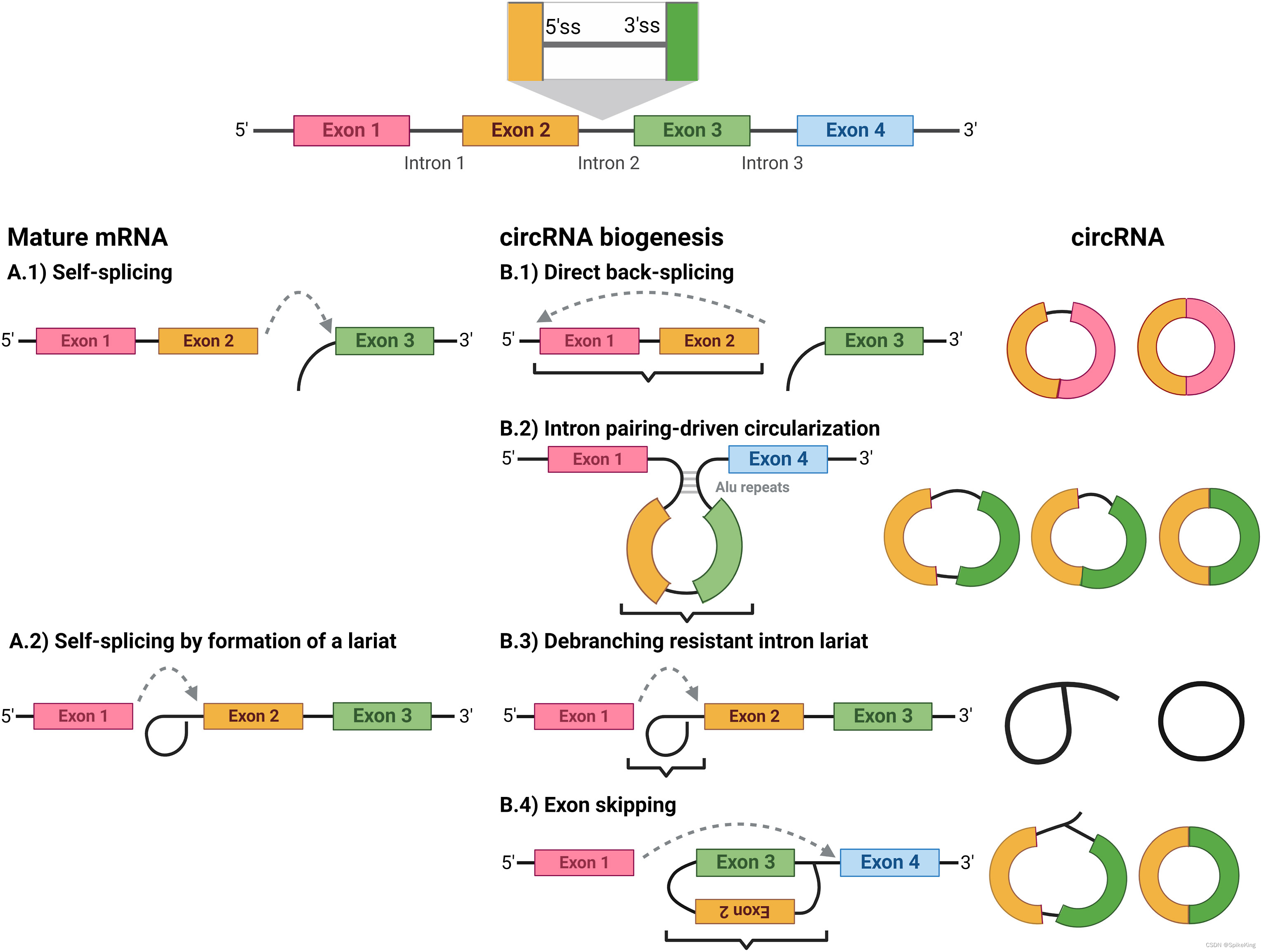
Biotech - 环状 mRNA 的 LNP 递送系统 与 成环框架
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/133992971 环状 RNA(或 circRNA )是一种单链 RNA,与线性 RNA 不同,形成一个共价闭合的连续环。在环…
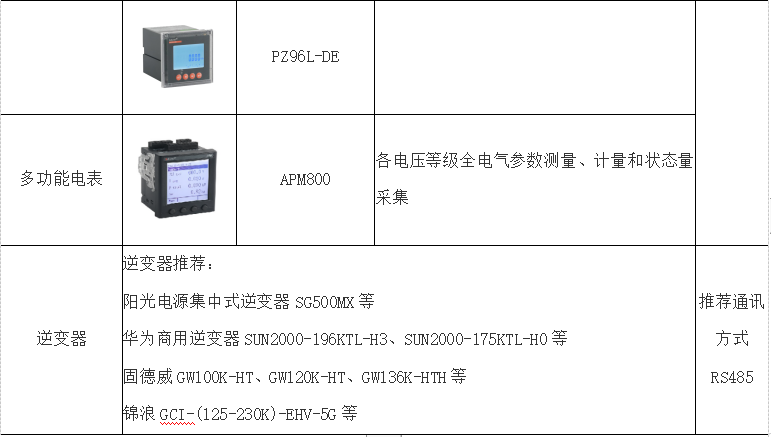
基于物联网云平台的分布式光伏监控系统的设计与实现
贾丽丽
安科瑞电气股份有限公司 上海嘉定 201801 摘要:针对国内光伏发电监控系统的研究现状,文中提出了基于云平台的光伏发电监控体系。构建基于B/S架构的数据实时采集与推送,以SSH(strutsspringhibernate)作为Web开发框架,开发基…