本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/188122.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
ardupilot开发 --- EKF 篇
1. EKF1~EKF3
待续…
2. Ardupilot滤波算法的演变 使用DCM还是EKF? AHRS_EKF_USE: set to “1” to use the EKF, “0” to use DCM for attitude control and inertial nav (Copter-3.2.1) or ahrs dead reckoning (Plane) for position control. In Copter-3.3 (and highe…
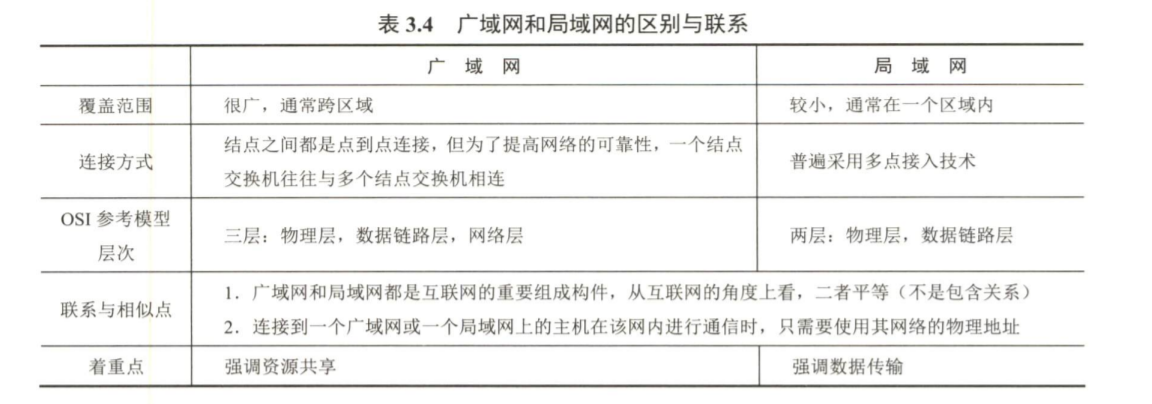
计算机网络之数据链路层(全)
[复习提示] 王道:本章是历年考试中考查的重点。要求在了解数据链路层基本概念和功能的基础上,重点掌握滑动窗口机制、三种可靠传输协议、各种MAC协议、HDLC协议和PPP协议,特别是CSMA/CD协议和以太网帧格式,以及局域网的争用期和最…

前端入门(一)JavaScript语法、数据类型、运算、函数
文章目录 概念JavaScript编写的位置基本语法数据类型变量声明var、let、constundefined与null的区别字符串类型数组Map和Set函数定义与参数传递 变量的作用域let、const方法的定义与调用常用内部对象json对象原型操作BOM对象操作DOM对象表单操作(验证)MD…
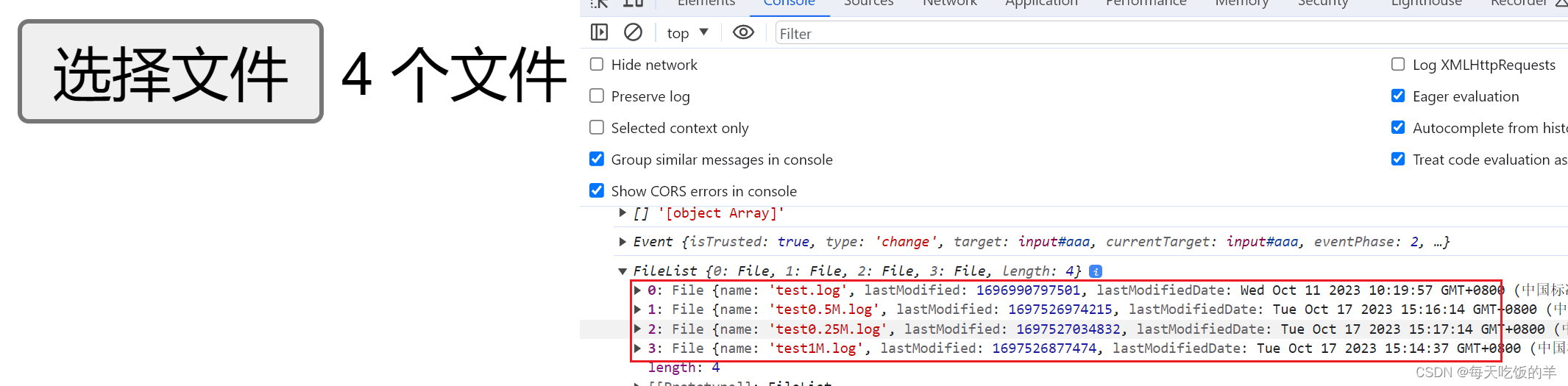
input改造文件上传,el-table的改造,点击上传,拖拽上传,多选上传
第一个input标签效果 第二个input标签的效果 el-table的改造效果 <template><div class"outerBox"><div class"analyze" v-if"status"><div class"unFile"><div class"mainBox"><img clas…
Kafka入门05——基础知识
目录
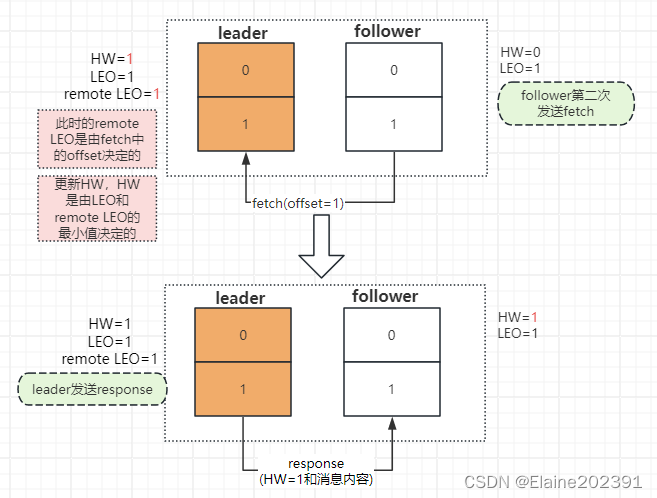
副本数据同步原理
HW和LEO的更新流程
第一种情况
第二种情况
数据丢失的情况
解决方案
Leader副本的选举过程
日志清除策略和压缩策略
日志清除策略
日志压缩策略
Kafka存储手段
零拷贝(Zero-Copy)
页缓存(Page Cache&…

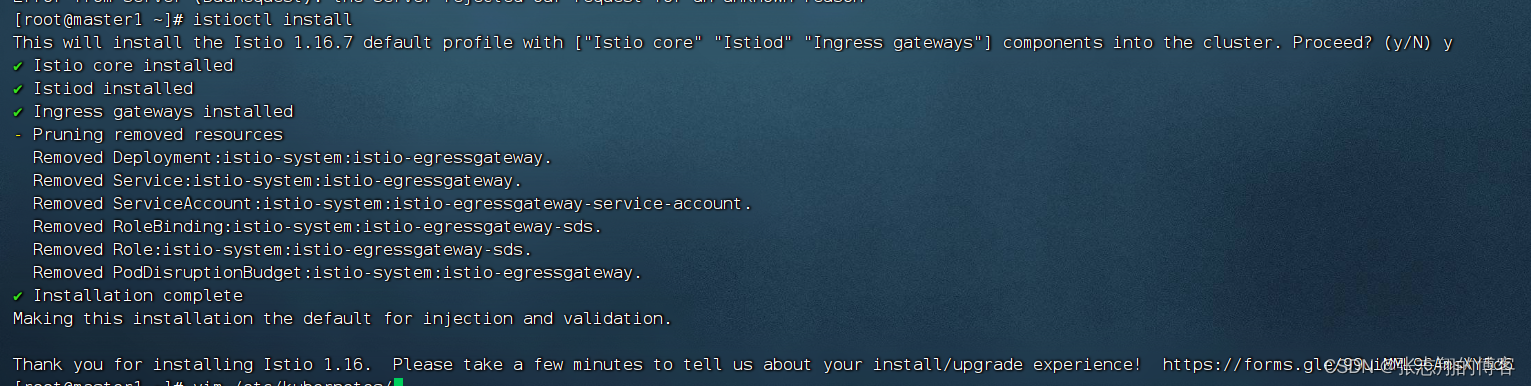
Istio 自动注入 sidecar 失败导致无法访问webhook服务
最近工作中在部署Istio环境的过程中发现官方示例启动的pod不能访问不到Istio的webhook,这个问题也是困扰了我一天,特此记录,便于日后查阅。 我把他归类到sidecar注入失败的情况,报错如下: 1、第一种可能(我…
【C++】priority_queue仿函数
今天我们来学习C中另一个容器适配器:优先级队列——priority_queue;和C一个重要组件仿函数:
目录
一、priority_queue
1.1 priority_queue是什么
1.2 priority_queue的接口
1.2.1 priority_queue使用举例
二、仿函数
三、关于priority…
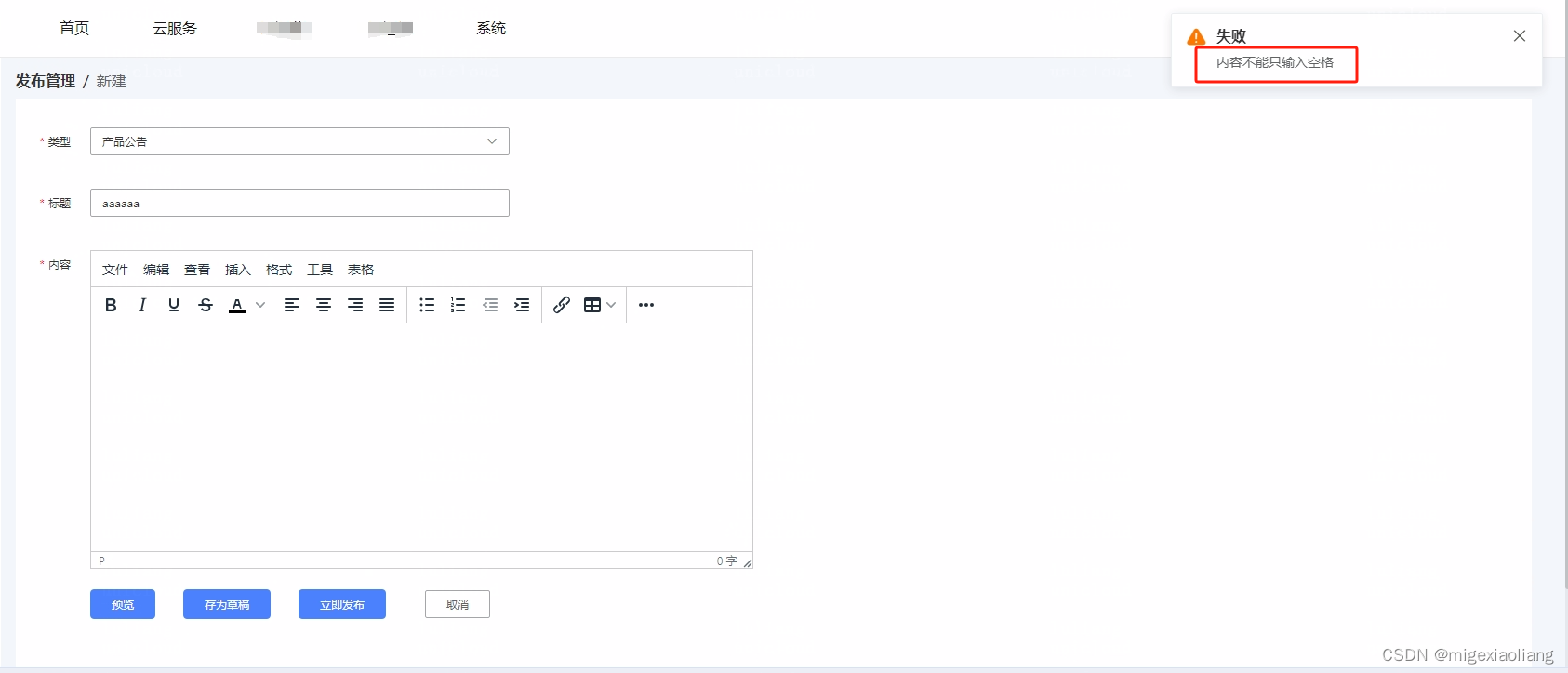
tinymce输入框怎么限制只输入空格或者回车时不能提交
项目场景:
项目相关背景:
tinymce输入框只输入空格或者回车时提交的空数据毫无意义,所以需要限制一下
无意义的输入: 解决方案:
因为tinymce输入框传到后端的数据是代码形式,所以不能直接.trem&#…

【ARM AMBA Q_Channel 详细介绍】
文章目录 1.1 Q_Channel 概述1.2 Q-Channel1.2.1 Q-Channel 接口1.2.2 Q-Channel 接口的握手状态1.2.3 握手信号规则 1.3 P_Channel的握手协议1.3.1 device 接受 PMU 的 power 请求1.3.2 device 拒绝 PMU 的 power 请求 1.4 device 复位信号与 Q _Channel 的结合1.4.1 RESETn 复…
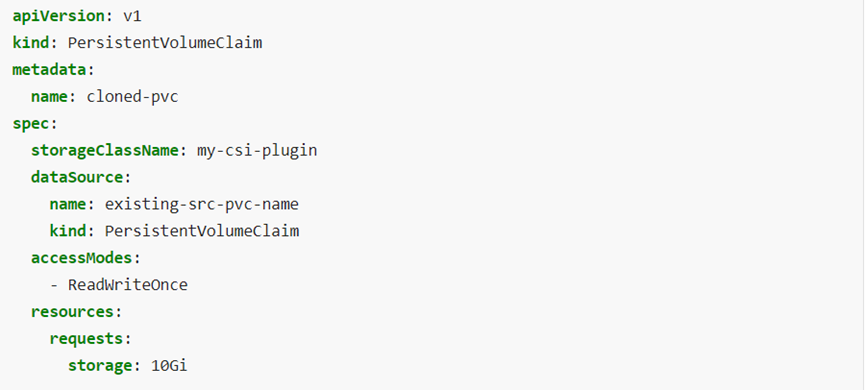
Kubernetes技术与架构-存储 2
在Kubernetes集群中,一块持久化存储空间是可以被回收再利用,简称PV,即PersistentVolume,Pod实例需要使用PV的时候,可以使用PVC定义申请PV存储资源,PVC是PersistentVolumeClaim的简称,PV的申请分…
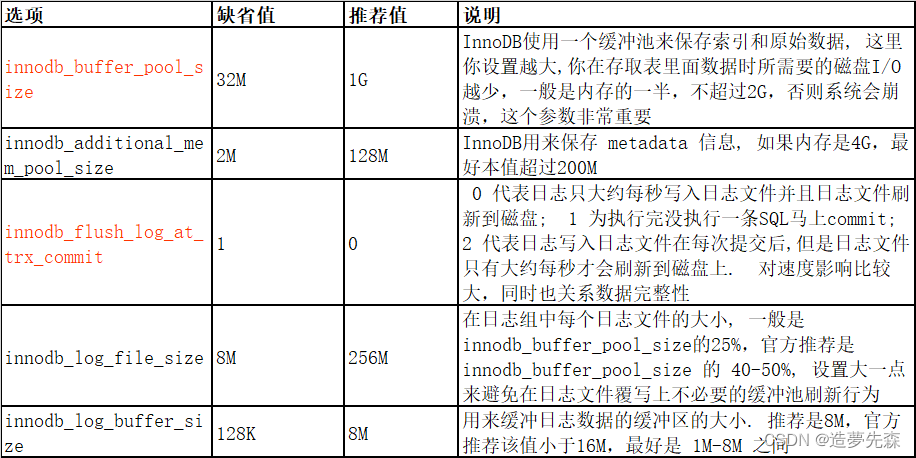
Mysql 索引原理和优化方式
一、索引原理
什么是索引
索引是存储引擎用于快速找到记录的一种数据结构。可以联想到字典中的目录。
索引的分类
(1) Hash 索引
Hash 索引是比较常见的一种索引,他的单条记录查询的效率很高,时间复杂度为1。但是,…

【linux】麒麟v10安装Redis哨兵集群(ARM架构)
安装redis单示例的请看:麒麟v10安装Redis(ARM架构) 安装服务器
HostnameIP addressmaster,sentinel192.168.0.1slave1,sentinel192.168.0.2slave2,sentinel192.168.0.3 下载安装包
(三台都操作) wget https://re…

死锁Deadlock
定义 死锁是指两个或多个线程互相持有对方所需的资源,从而导致它们无法继续执行的情况。如下图所示,现有两个线程,分别是线程A及线程B,线程A持有锁A,线程B持有锁B。此时线程A想获取锁B,但锁B需等到线程B的结…
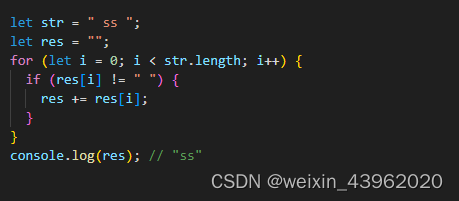
JS清除字符串中的空格
一、replace()方法
replace方法在字符串中搜索值或正则表达式,返回已替换值的新字符串,不会更改原始字符串。
去除字符串内所有的空格:str str.replace(/\s*/g,“”)
去除字符串内两头的空格:str str.replace(/^\s*|\s*$/g,“…
忆联再次与 OpenCloudOS 完成产品兼容性互认证
近日,忆联数据中心级SSD UH711a与OpenCloudOS 完成相互兼容认证,测试期间,整体运行稳定,在功能、性能及兼容性方面表现良好。 兼容认证证书
作为国产开源操作系统社区,OpenCloudOS 沉淀了腾讯及多家厂商在软件和开源生…
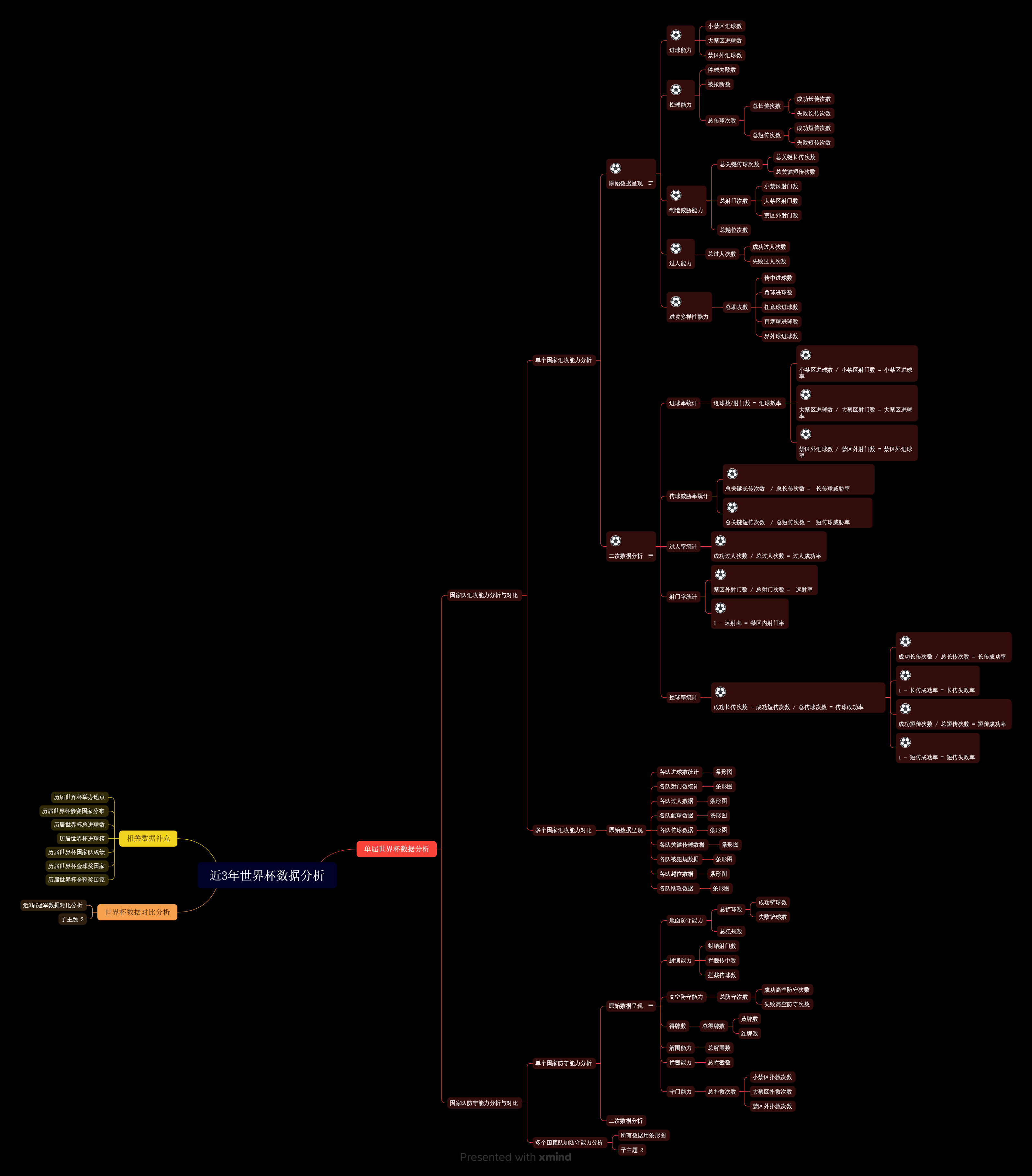
我做了一个世界杯的可视化网站...
好吧我是标题党,标题用的是完成时,但是事实上我这个还没完成。
这学期有个数据可视化的作业,遂决定做一个世界杯主题的可视化网站。基于Python、Flask和Echarts。
大概思路可以用下图表示: 因此网站也将分为3个大块,…

Zeth:首个Type 0 zkEVM
1. 引言
一年前,V神博客The different types of ZK-EVMs中指出:
以太坊初始设计未围绕ZK友好性,因此,以太坊协议的很多部分都需要大量计算来做ZK-prove。Type 1 zkEVM致力于精准复制以太坊,因此它没有办法减轻这些低…
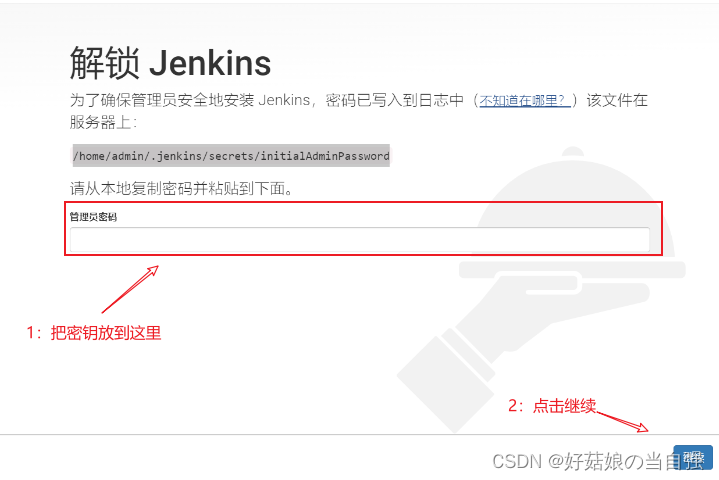
【Jenkins 安装】
一:安装文件夹准备
在/home/admin 界面下新建三个文件夹,用来安装tomcat、maven
1.打开,/home/admin目录 cd /home/admin 2.新建三个文件夹 mkdir tomcat mkdir maven
二:安装tomcat
1.打开tomcat目录进行tomcat的安装 访问:h…