本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/217728.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
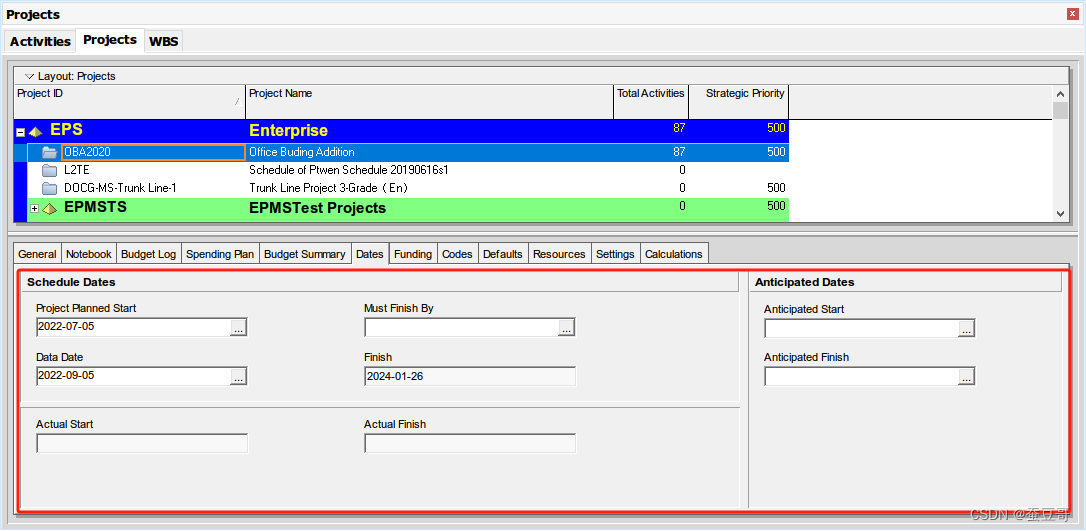
P6入门:项目初始化2-项目详情之日期Date
前言
使用项目详细信息查看和编辑有关所选项目的详细信息,在项目创建完成后,初始化项目是一项非常重要的工作,涉及需要设置的内容包括项目名,ID,责任人,日历,预算,资金,分类码等等&…

GEE:将鼠标变成十字指针,点击获取影像值,显示值到UI中
作者:CSDN @ _养乐多_
本文记录了在 Google Earth Engine(GEE)开发中,将鼠标变成十字指针,点击获取影像值,显示值到UI中的代码片段。这段代码复制过去修改变量名就可以用了。
效果如下图所示, 文章目录 一、代码片段一、代码片段
使用的时候将 YLDImage 变量换成你屏…
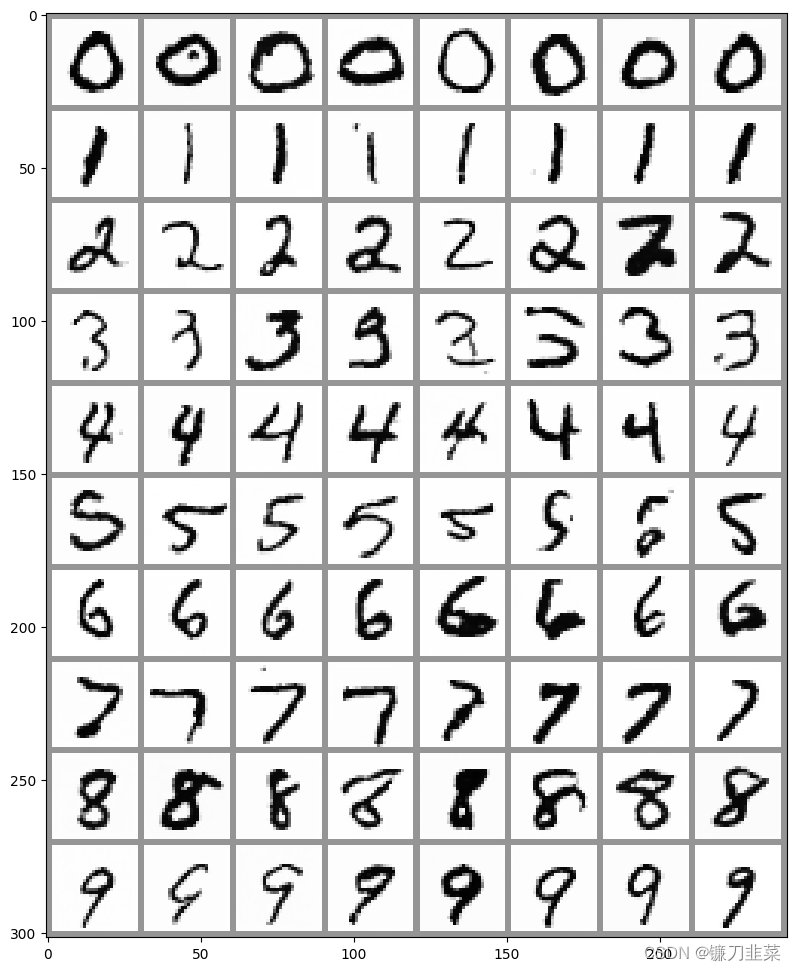
【扩散模型】实战:创建一个类别条件扩散模型
创建一个类别条件扩散模型 1. 配置和数据准备2. 创建一个以类别为条件的UNet模型3. 训练和采样 本文介绍一种给扩散模型添加额外条件信息的方法。具体地,将在MNIST数据集上训练一个以类别为条件的扩散模型。并且可以在推理阶段指定想要生成的是哪个数字。 1. 配置和…

百度王颖:百度文库以AI创作能力突破语言边界,促进思想碰撞和文化融通
1月9日,2023年世界互联网大会乌镇峰会“网络传播与文明交流互鉴论坛”召开。百度副总裁、互娱和垂类平台负责人王颖出席并发表“以技术搭建跨文化交流桥梁”主题演讲。她表示,在大模型的加持下,百度各个产品都在重构,通过技术助力…
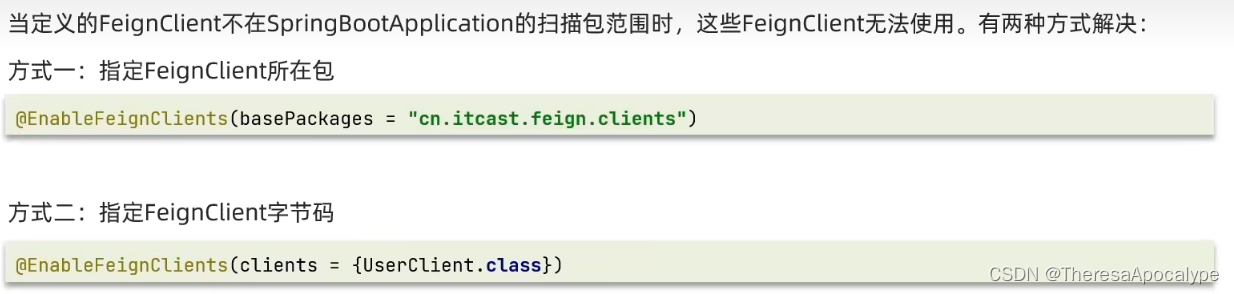
Feign ------快速入门 掌握Feign在项目中的使用
目录
为什么要Feign?
定义和基本使用
自定义Feign配置
Feign性能优化
Feign最佳实践
实现Feign最佳实践
注意点: 为什么要Feign? 知道一门技术存在的原因 是很重要的一件事 首先, 不同的微服务模块之间是需要数据交互和调用,为了完成某些业务逻辑,不同的…
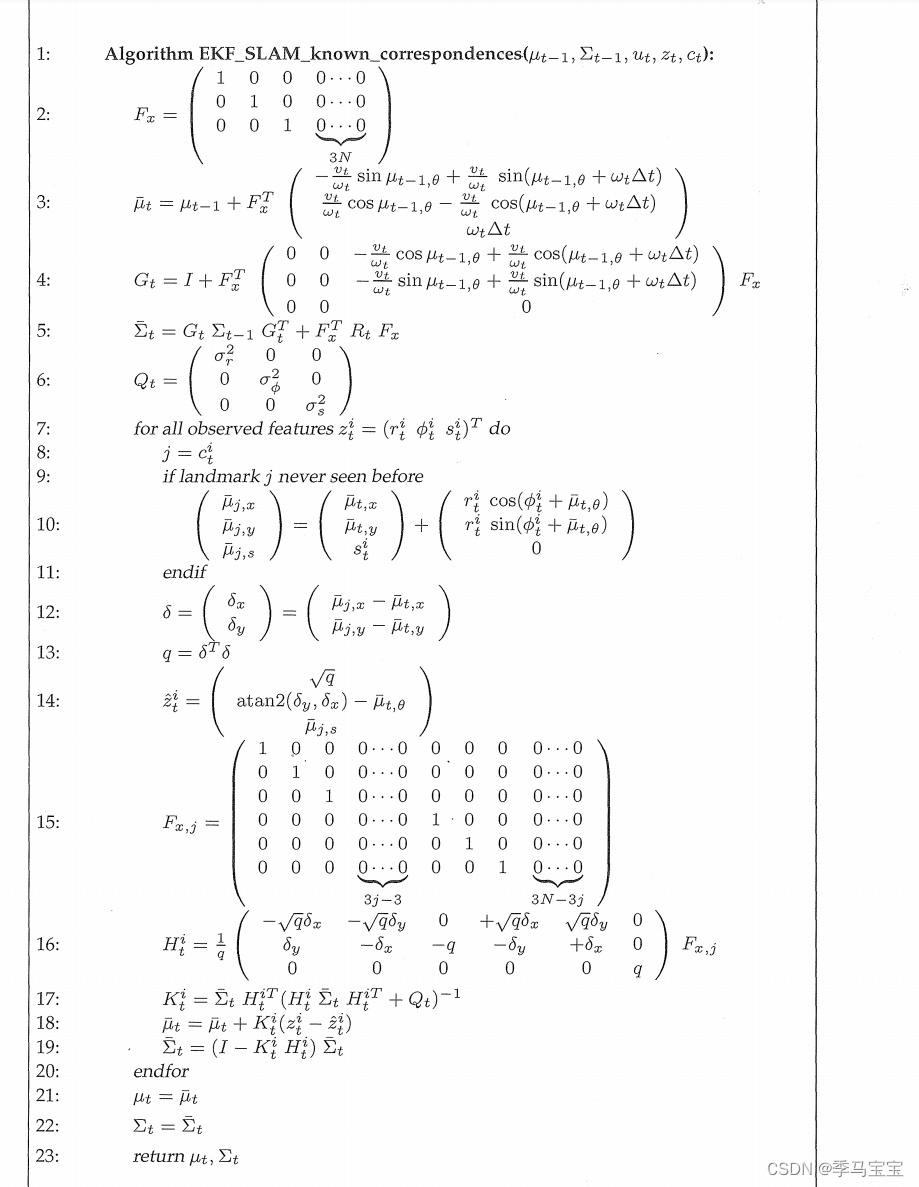
python实现全向轮EKF_SLAM
python实现全向轮EKF_SLAM 代码地址及效果运动预测观测修正参考算法 代码地址及效果
代码地址
运动预测
简化控制量 u t u_t ut 分别定义为 v x Δ t v_x \Delta t vxΔt, v y Δ t v_y \Delta t vyΔt,和 ω z Δ t \omega_z \Delta t ωz…

Clickhouse SQL
insert
insert操作和mysql一致
标准语法:insert into [table_name] values(…),(….)从表到表的插入:insert into [table_name] select a,b,c from [table_name_2]
update 和 delete
ClickHouse 提供了 Delete 和 Update 的能力,这类操作…
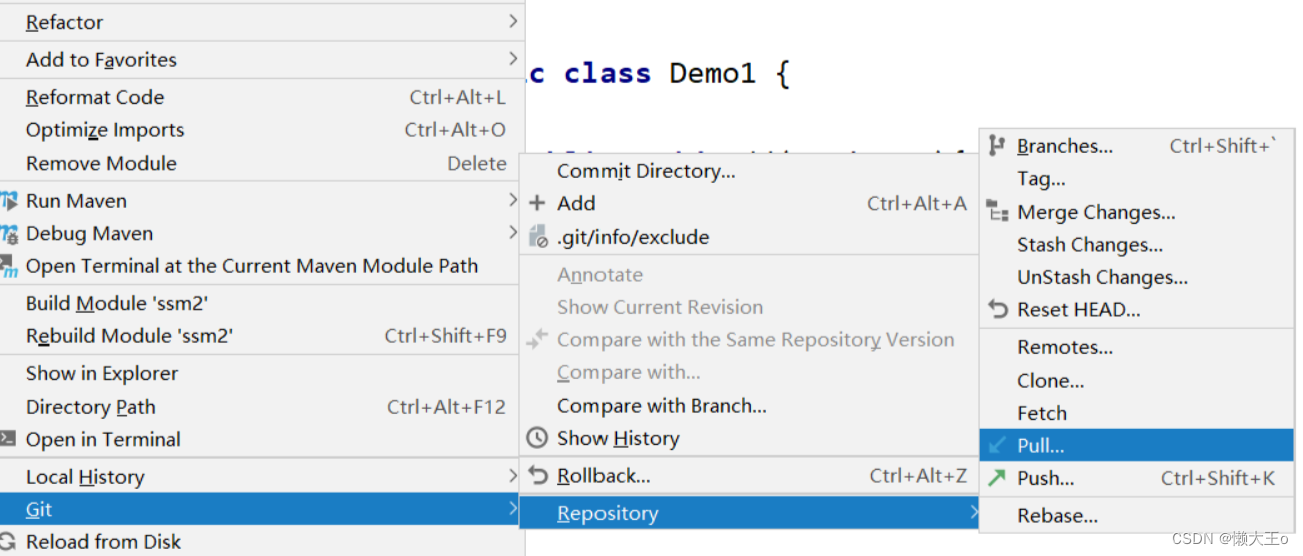
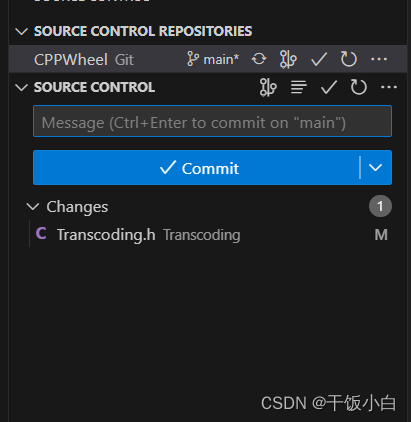
【Git】gui图形化界面的使用、ssh协议以及idea集成Git
目录
gui图形化界面的使用
介绍 特点 gui图形的使用
ssh协议
介绍
步骤及概念 ssh协议的使用 配置公钥
idea集成Git
idea配置git IDEA安装gitee IDEA中登入Git 编辑 项目分享
克隆分享的项目 编辑
编辑 idea上传远程 gui图形化界面的使用
介绍 GUI(…
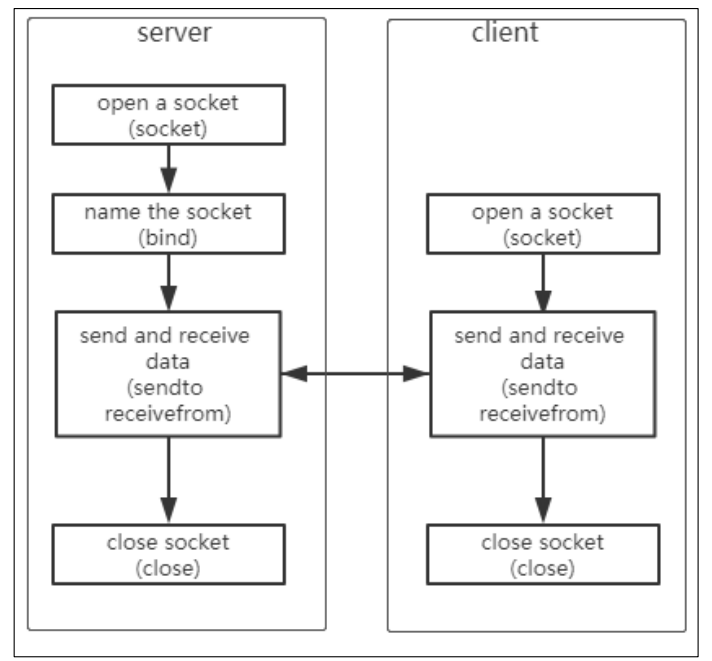
网络通信TCP、UDP详解
目录 IP 和端口
网络传输中的 2 个对象:server 和 client
两种传输方式:TCP/UDP
TCP 和 UDP 原理上的区别
为何存在 UDP 协议
TCP/UDP 网络通信大概交互图 IP 和端口
所有的数据传输,都有三个要素 :源、目的、长度。
怎么表…

iOS移动应用安全加固:保护您的App免受恶意攻击的重要步骤
目录
iOS移动应用安全加固:保护您的App免受恶意攻击的重要步骤
摘要
引言
一、APP加固的概念
二、APP加固方案的比较
三、保护iOS应用的安全
四、总结
参考资料 摘要
本文介绍了移动应用程序(App)加固的概念和流程,以及市…
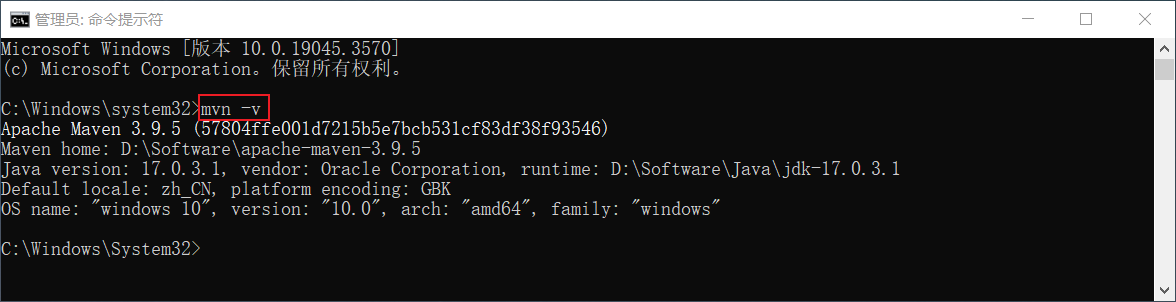
Windows 安装 Maven
Maven 安装
Maven 下载地址:https://maven.apache.org/download.cgi 下载 apache-maven-3.9.5-bin.zip 到本地解压到 D:\Software\apache-maven-3.9.5 配置阿里云镜像
配置阿里云远程仓库镜像地址,打开配置文件 D:\Software\apache-maven-3.9.5\conf\s…
1. 深度学习——激活函数
机器学习面试题汇总与解析——激活函数
本章讲解知识点 什么是激活函数? 为什么要使用激活函数? 详细讲解激活函数 本专栏适合于Python已经入门的学生或人士,有一定的编程基础。本专栏适合于算法工程师、机器学习、图像处理求职的学生或人…
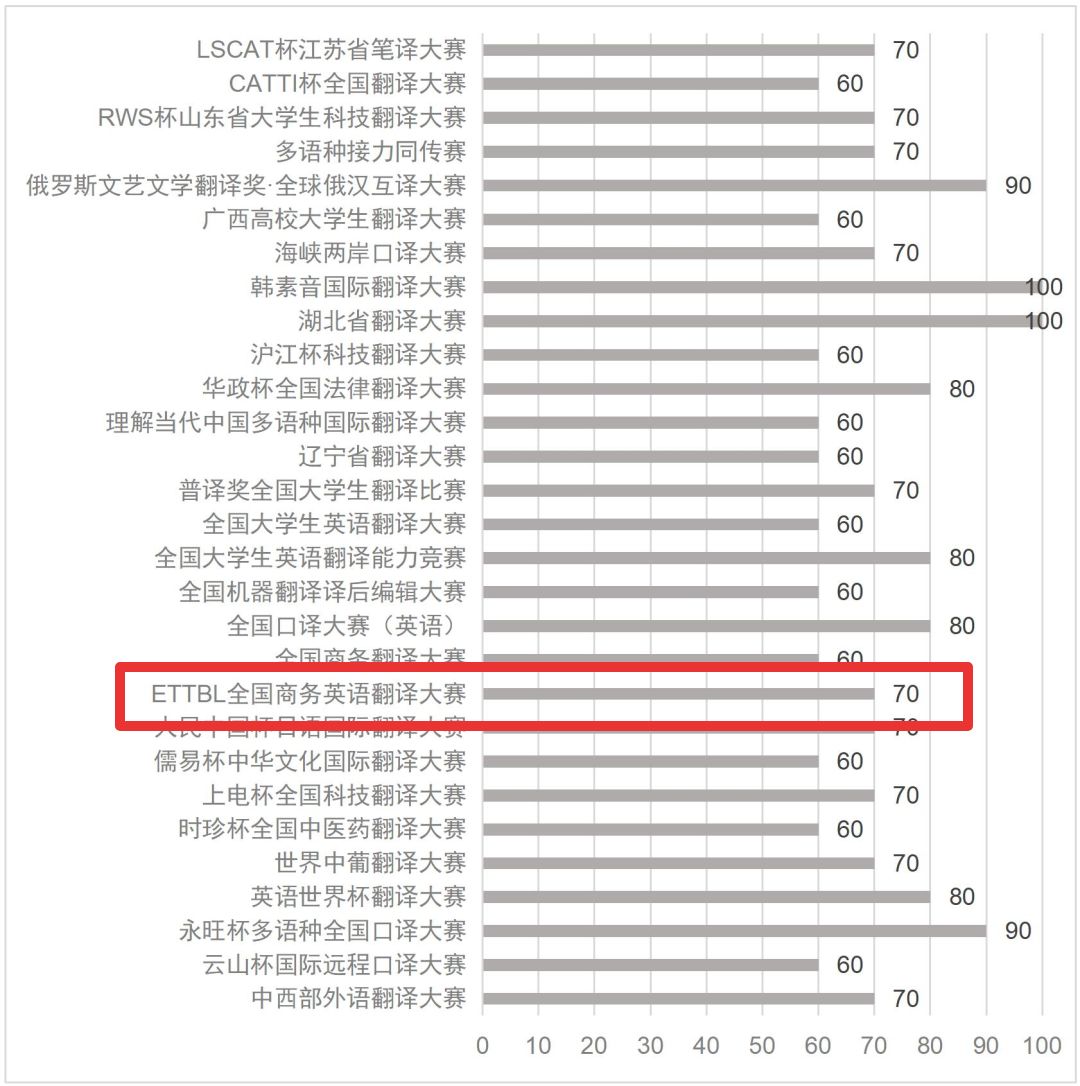
赛氪ETTBL全国商务英语翻译大赛入榜国内翻译赛事发展评估报告
中国外文局下属CATTI项目管理中心出具2023 国内翻译赛事发展评估报告,ETTBL全国商务英语翻译大赛赫然在榜
2023年11月6日,继2022年首次发布国内翻译赛事发展评估报告后,中国外文局CATTI项目管理中心和中国外文界平台联合发布了《2023国内翻译…
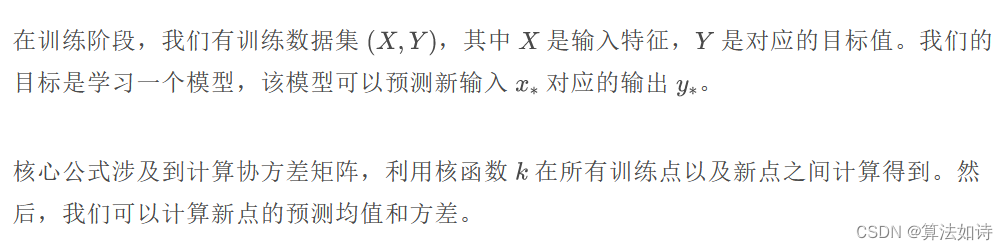
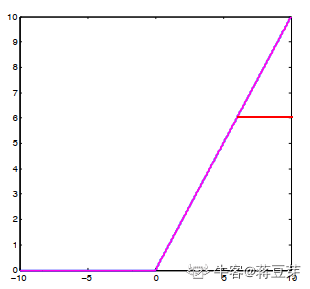
高斯过程回归 | GPR高斯过程回归
高斯过程回归(Gaussian Process Regression, GPR)是一种强大的非参数回归方法,它通过假设数据是从一个高斯过程中生成的来预测新的数据点。 高斯过程是一种定义在连续输入空间上的随机过程,其中任何有限集合的观测值都呈多变量高斯分布。 实现GPR的Python代码import numpy …
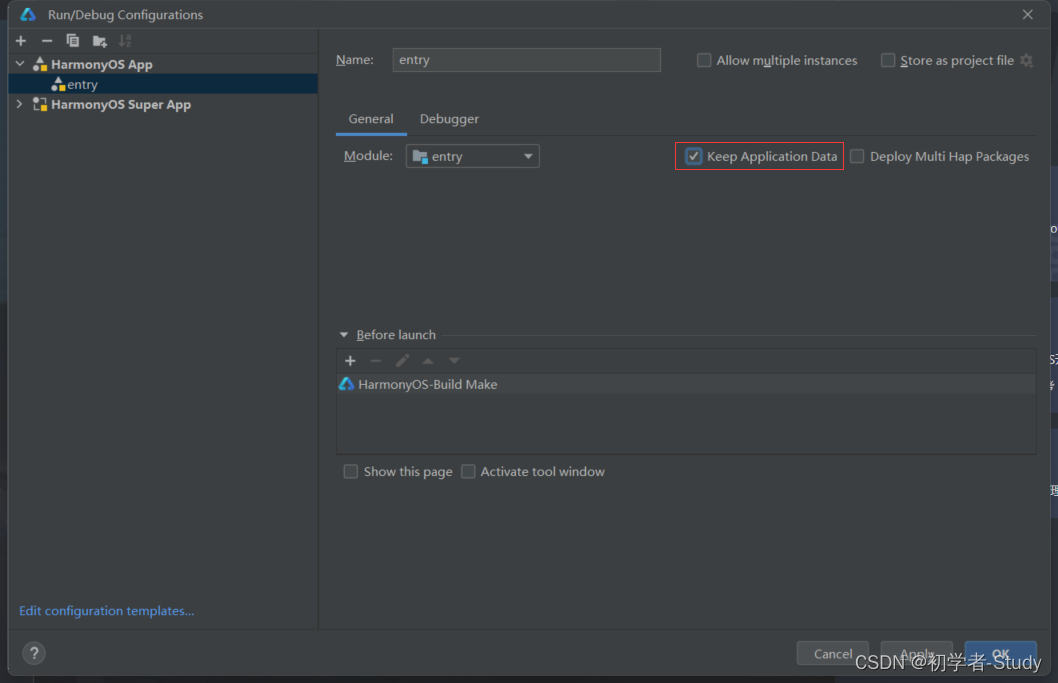
Harmony 应用开发的知识储备
Harmony 应用开发的知识储备 前言正文一、DevEco Studio版本二、手机版本① 环境变量 三、API版本四、开发语言五、运行调试 前言 这里先说明一点,如果你对Android应用开发很熟悉,那么做Harmony应用开发也可以驾轻就熟,只不过在此之前你需要知…
建造者模式 rust和java的实现
文章目录 建造者模式介绍优点缺点使用场景 实现javarust rust代码仓库 建造者模式
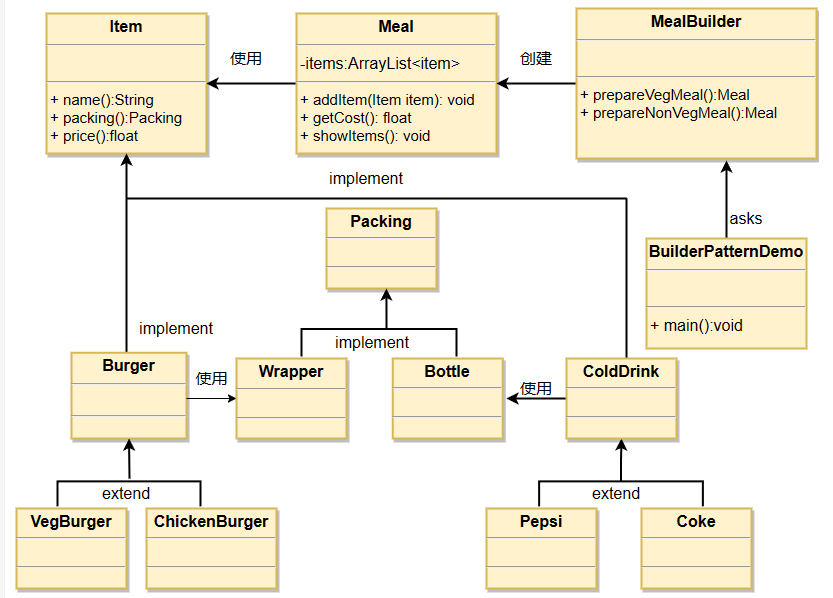
建造者模式(Builder Pattern)使用多个简单的对象一步一步构建成一个复杂的对象。
一个 Builder 类会一步一步构造最终的对象。该 Builder 类是独立于其他对象的。
介绍…

django|报错SQLite 3.8.3 or later is required的解决方案
迁移原同事写的程序,到新服务器上边。运行报错。解决方案有三种
降低django版本升级sqlite3,不低于3.8.3版本修改django源码
方案一、降低django版本
卸载高版本django
pip uninstall django安装低版本,如
pip install django2.1.7注意&…

使用LLama和ChatGPT为多聊天后端构建微服务
微服务架构便于创建边界明确定义的灵活独立服务。这种可扩展的方法使开发人员能够在不影响整个应用程序的情况下单独维护和完善服务。然而,若要充分发挥微服务架构的潜力、特别是针对基于人工智能的聊天应用程序,需要与最新的大语言模型(LLM&…

已解决:云原生领域的超时挂载Bug — Kubernetes深度剖析
🌷🍁 博主猫头虎(🐅🐾)带您 Go to New World✨🍁 🦄 博客首页——🐅🐾猫头虎的博客🎐 🐳 《面试题大全专栏》 🦕 文章图文…