本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/254287.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
Elasticsearch(ES)概述
文章目录 一.什么是Elasticsearch?1.正向索引和倒排索引2.Mysql和ES的概念对比3.安装elasticsearch、kibana 二.IK分词器三.索引库操作四.文档操作五.RestClient操作索引库1.初始化RestClient2.创建索引库3.删除索引库4.判断索引库是否存在 六.RestClient操作文档1.新增文档2.…

堆详解(C语言实现)
文章目录 写在前面1. 堆的概念和性质1.1 堆的概念1.2 堆的性质 2 堆的实现2.1 堆结构的定义2.2 堆的初始化2.3 堆的插入2.3.1 向上调整算法2.3.2 堆的插入元素过程 2.4 堆的删除2.4.1 向下调整算法2.4.2 堆的删除元素过程 2.5 获取堆顶元素2.6 获取堆元素个数2.7 判断堆是否为空…
Linux多路转接select,poll
文章目录 目录
文章目录
一、五种IO模型
1.阻塞IO:
2.非阻塞IO
3.信号驱动IO
4.IO多路转接
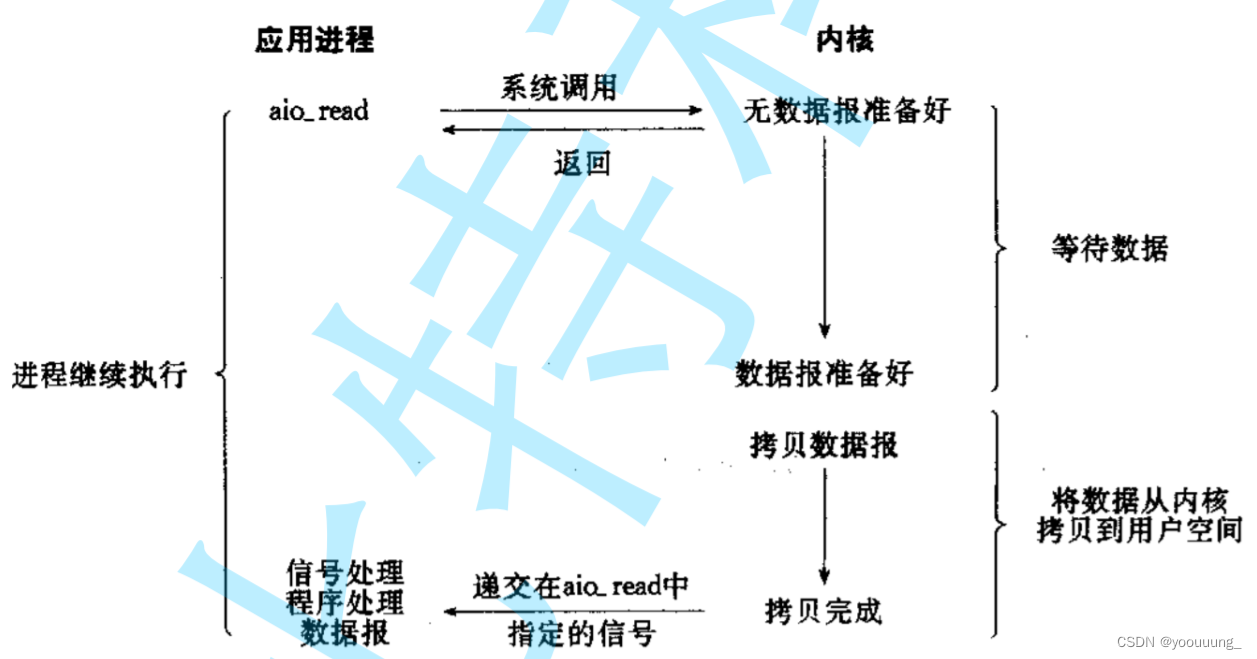
5.异步IO
二、高级IO的一些重要概念
1.同步通信和异步通信
2.阻塞和非阻塞
三、其他高级IO
四、非阻塞IO
1.fctl函数
2.实现setNoBlock函数,将文件描述符设置…
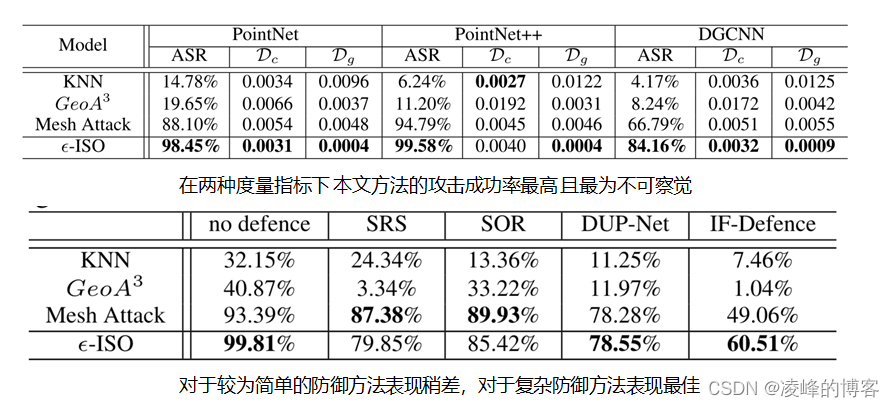
物理世界中的等距3D对抗样本
论文题目:Isometric 3D Adversarial Examples in the Physical World 会议:NIPS 2022
点云:
点云——表达目标空间分布和目标表面特性的海量点集合,点包含xyz坐标信息 能够包含颜色等其他信息
使用顶点、边和面的数据表征的三维…

SSM手饰网店的设计与实现-计算机毕设 附源码 32252
SSM手饰网店的设计与实现 摘 要 本论文主要论述了如何使用java语言开发一个SSM手饰网店,本系统将严格按照软件开发流程进行各个阶段的工作,采用B/S架构,面向对象编程思想进行项目开发。在引言中,作者将论述手饰网店的当前背景以及…
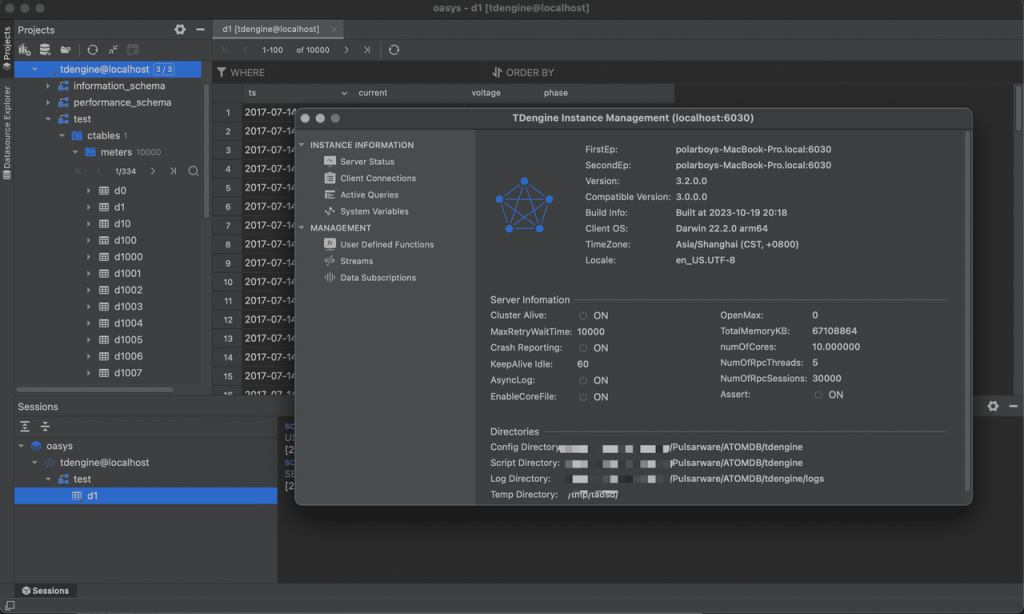
助力企业实现更简单的数据库管理,ATOMDB 与 TDengine 完成兼容性互认
为加速数字化转型进程,当下越来越多的企业开始进行新一轮数据架构改造升级。在此过程中,全平台数据库管理客户端提供了一个集中管理和操作数据库的工具,提高了数据库管理的效率和便利性,减少了人工操作的复杂性和错误率࿰…
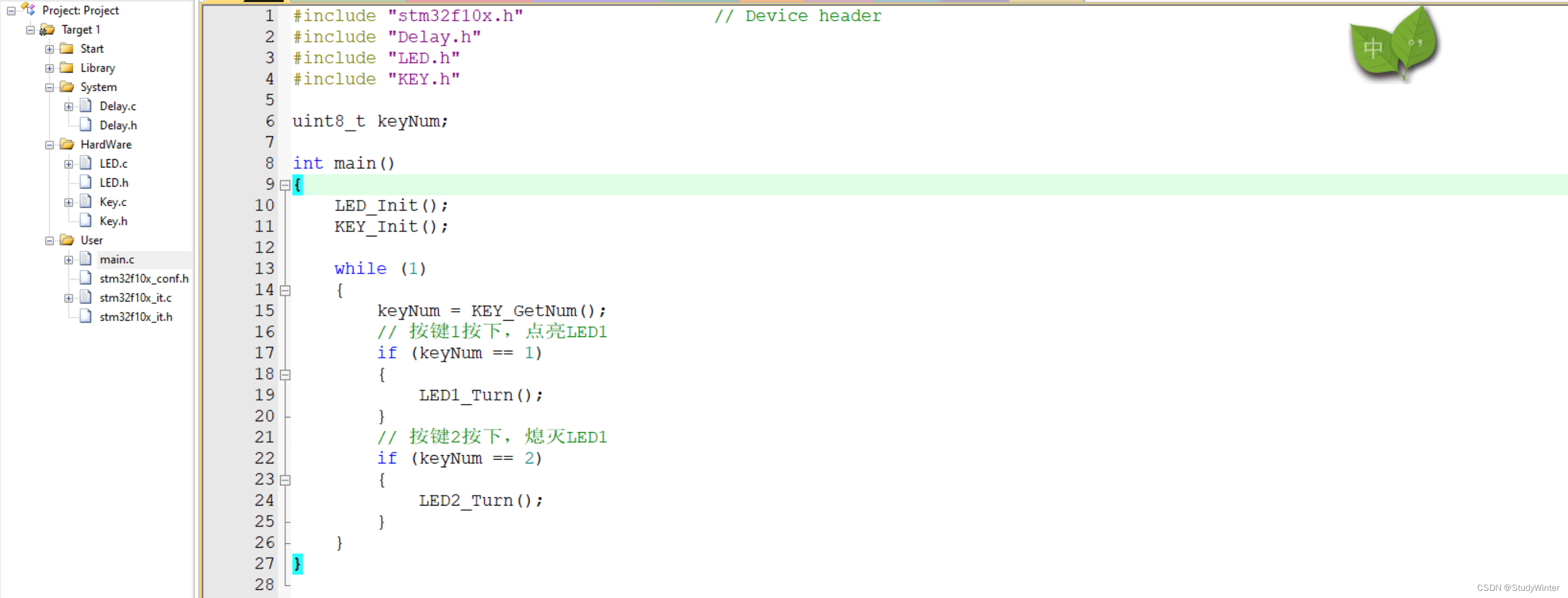
【STM32】GPIO输入
1 GPIO输出
1.1 按键简介
按键:常见的输入设备,按下导通,松手断开
按键抖动:由于按键内部使用的是机械式弹簧片来进行通断的,所以在按下和松手的瞬间会伴随有一连串的抖动 1.2 传感器模块简介
传感器模块ÿ…

Vue快速实践总结 · 下篇
文章目录 组件间通信方式父 --> 子通信props插槽 子 --> 父通信(自定义事件)任意组件通信全局事件总线消息订阅与发布 Vuex工作原理运行环境简单使用GettersmapState与mapGettersmapActions与mapMutations模块化 命名空间 VueRouter路由的作用与分…
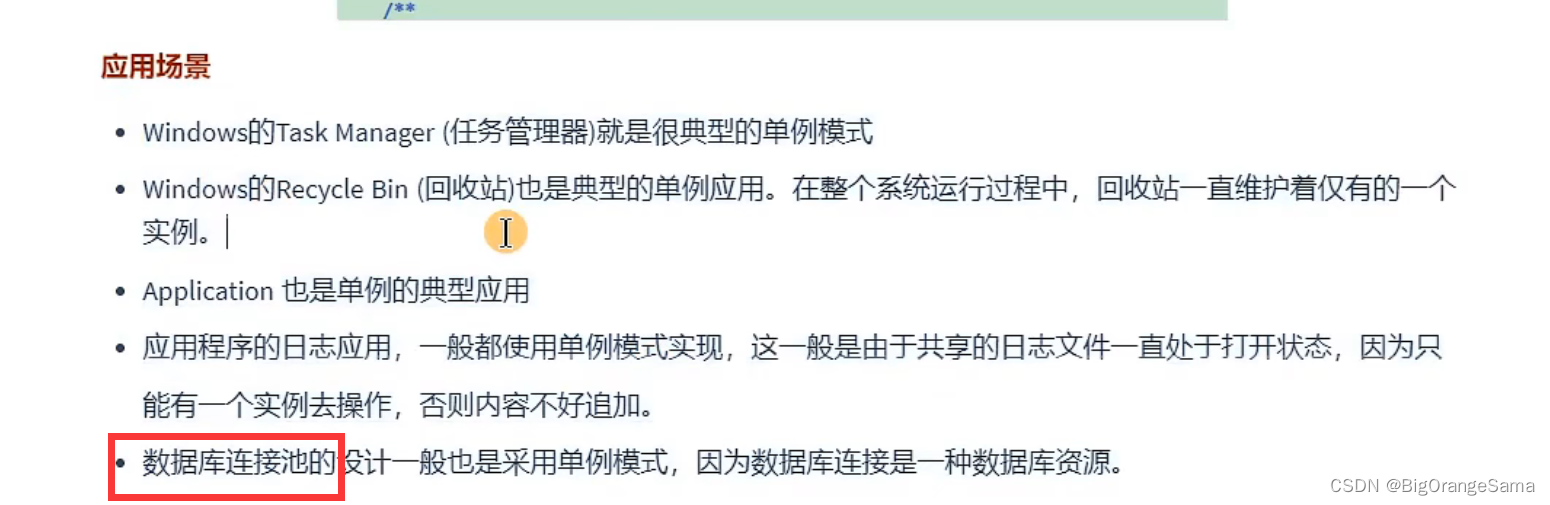
java学习part15单例模式
107-面向对象(高级)-单例设计模式与main()的理解_哔哩哔哩_bilibili 1.单例
就是说在某些开发场景中,某个类只要有一个对象就足够使用了,不需要重复创建。
(理解:比如说是数据库对象,使用时创建一个可以处理所有的数…

【论文阅读】ActiveNeRF:通过不确定性估计候选新视图
【论文阅读】ActiveNeRF: Learning where to See with Uncertainty Estimation Abstract1 Introduction3 Background4 NeRF with Uncertainty Estimation5 ActiveNeRF5.1 Prior and Posterior Distribution5.2 Acquisition Function5.3 Optimization and Inference 6 Experimen…

【青蛙跳台阶问题 —— (三种算法)】
青蛙跳台阶问题 —— (三种算法) 一.题目介绍1.1.题目1.2.图示 二.解题思路三.题解及其相关算法3.1.递归分治法3.2.动态规划算法(Dynamic Programming)3.3.斐波那契数列法 四.注意细节 一.题目介绍
1.1.题目 一只青蛙一次可以跳上1级台阶&am…
大电流和大电压谁对人体伤害大
突然想起以前看的这个, 网上有很多解答了这个问题,答案是大电流比大电压对人体伤害大。
我之所以重新来写些, 是想起一种有趣的比喻, 这个答案不绝对。
先看一个场景, 一群牛和一头老虎对你冲来, 谁对你的…

盘点72个Android系统源码安卓爱好者不容错过
盘点72个Android系统源码安卓爱好者不容错过
学习知识费力气,收集整理更不易。
知识付费甚欢喜,为咱码农谋福利。
链接:https://pan.baidu.com/s/1qiWeLjF2i4dlgmTYgPPSvw?pwd8888
提取码:8888
项目名称
A keyboardlisten…

用C++和python混合编写数据采集程序?
之前看过一篇文章,主要阐述的就是多种语言混合编写爬虫程序,结合各种语言自身优势写一个爬虫代码是否行得通?觉得挺有意思的,带着这样的问题,我尝试着利用我毕生所学写了一段C和python混合爬虫程序,目前运行…
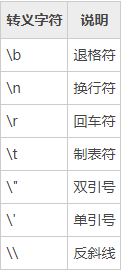
Python continue的用法详解与转义字符及用法
Python continue的用法详解 continue 的功能和 break 有点类似,区别是 continue 只是忽略当次循环的剩下语句,接着开始下一次循环,并不会中止循环;而 break 则是完全中止循环本身。 如下程序示范了continue 的用法: # …
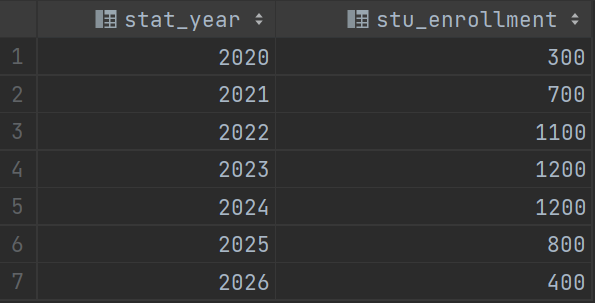
MySQL递归查询:洞悉数据的层层关联
在处理关系型数据库时,我们经常会遇到这样的情况:某些数据之间存在层级关系,例如目录、组织结构、评论等。在这些场景下,我们需要一种灵活的查询技术来处理这种层级关系。今天我们就来探讨MySQL中的递归查询,体验其独特…
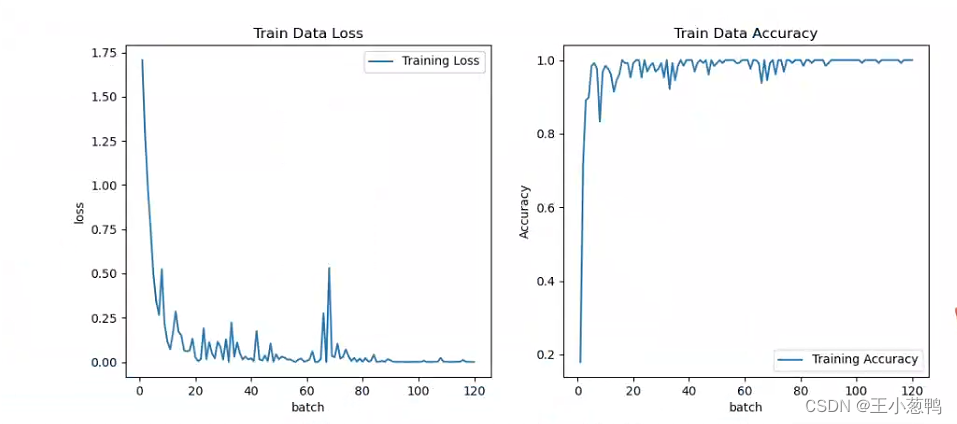
微信小程序+中草药分类+爬虫+torch
1 介绍
本项目提供中草药数据集,使用gpu、cpu版本的torch版本进行训练,将模型部署到后端flask,最后使用微信小程序进行展示出来。 数据爬虫可以参考:http://t.csdnimg.cn/7Olus 项目中的爬虫代码,并且本项目提供相同的…

DM8数据库版本升级
DM数据库版本升级说明
DM数据库的版本一直在不断的的迭代。 对于DM 的数据库版本,分大版本和小版本。
1)大版本:指DM6,DM7,DM8 这种。2)小版本:指同一个大版本子版本的变化,比如DM8的:8.1.0.1…