本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/26242.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
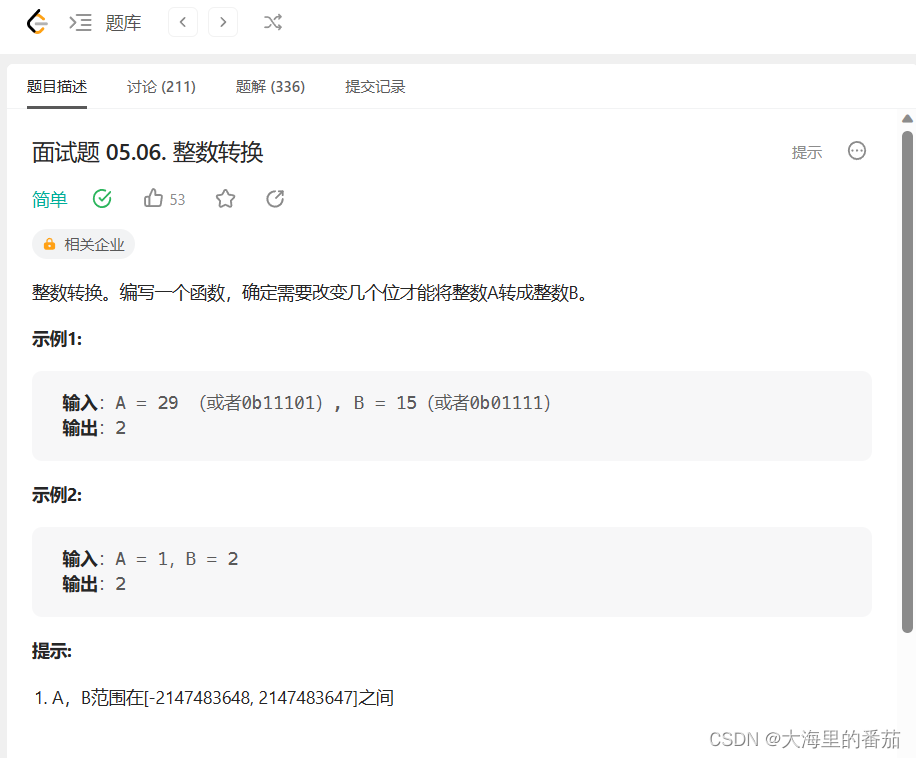
c语言每日一练(3)
前言:每日一练系列,每一期都包含5道选择题,2道编程题,博主会尽可能详细地进行讲解,令初学者也能听的清晰。每日一练系列会持续更新,暑假时三天之内必有一更,到了开学之后,将看学业情…
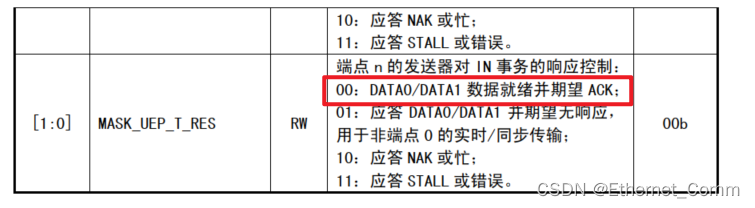
【沁恒蓝牙mesh】CH58x USB功能开发记录(三)
本博文主要记录 ,【沁恒蓝牙mesh】CH58x USB功能开发记录(三),数据收发基于寄存器级别解释 💖 作者简介:大家好,我是喜欢记录零碎知识点的小菜鸟。😎📝 个人主页…
本质矩阵E、基本矩阵F、单应矩阵H
1. E (归一化坐标对进行计算) t ^ R 为3*3的矩阵, 因为R,t共有6个自由度,又因为单目尺度等价性,所以实际上E矩阵共有5个自由度。因此至少需要5个点对来求解。
2. 基本矩阵F:根据两帧间匹配的像素点对儿计算
3*3且自由度为7的矩阵kF也为基础矩阵&#x…
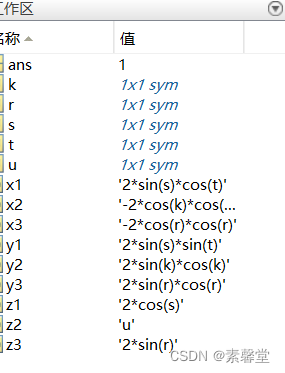
1.利用matlab建立符号表达式(matlab程序)
1.简述 、
1. 使用sym命令创建符号变量和表达式
语法:
sym(‘变量’,参数) %把变量定义为符号对象
说明:参数用来设置限定符号变量的数学特性,可以选择为’positive’、’real’和’unreal’, ’positive’ 表示为“正、实”符…

《面试1v1》ElasticSearch 集群索引分片
🍅 作者简介:王哥,CSDN2022博客总榜Top100🏆、博客专家💪 🍅 技术交流:定期更新Java硬核干货,不定期送书活动 🍅 王哥多年工作总结:Java学习路线总结…

SAP度量单位转换功能
针对今天N2项目提出业务痛点:物料30011110的基本单位是KG,在XXX的BOM里单位是G,由于物料没配单位转换关系,但系统又能正常进行转换,开发需要技术支持。 经专项调查,G和KG的转换是SAP相同量纲转换标准功能&…

燃爆!撕歌APP巅峰歌王赛精彩收官
7月12日—8月2日为期22天的巅峰歌王赛于近日圆满落幕,这场音乐盛宴吸引了来自全国各地的选手参加,共六万余用户参与。这场活动以在线比赛的形式让参赛者们展示了他们精湛的唱功和无限的音乐才华,同时也为渴望展现自我、追求梦想的人们提供了一…

智慧停车场:城市出行新潮流,轻松驶入未来
在如今城市日益拥堵的交通环境下,停车难题成为人们日常生活中的一大困扰。然而,随着科技的不断进步,智慧停车场的建设正为我们带来更为便捷、高效的出行体验,成为现代城市发展的重要一环。 智慧停车场利用先进的技术手段ÿ…

【动态规划】最长上升子序列 LIS
算法提高课笔记。 目录 问题的开始:最长上升子序列思路代码 怪盗基德的滑翔翼题意思路代码 登山题意思路代码 友好城市题意思路代码 拦截导弹题意思路代码 导弹防御系统题意思路代码 最长公共上升子序列题意思路代码 问题的开始:最长上升子序列
原题链…
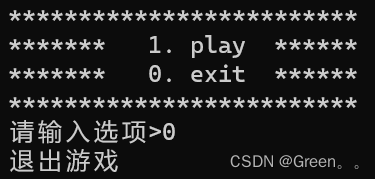
扫雷(超详解+全部码源)
C语言经典游戏扫雷 前言一.游戏规则二.所需文件三.创建菜单四.游戏核心内容实现1.创建棋盘2.打印棋盘3.布置雷4.排查雷5.game()函数具体实现 五.游戏运行实操六.全部码源 前言 😀C语言实现扫雷是对基础代码能力的考察。通过本篇文章你将学会如何制作出扫雷ÿ…
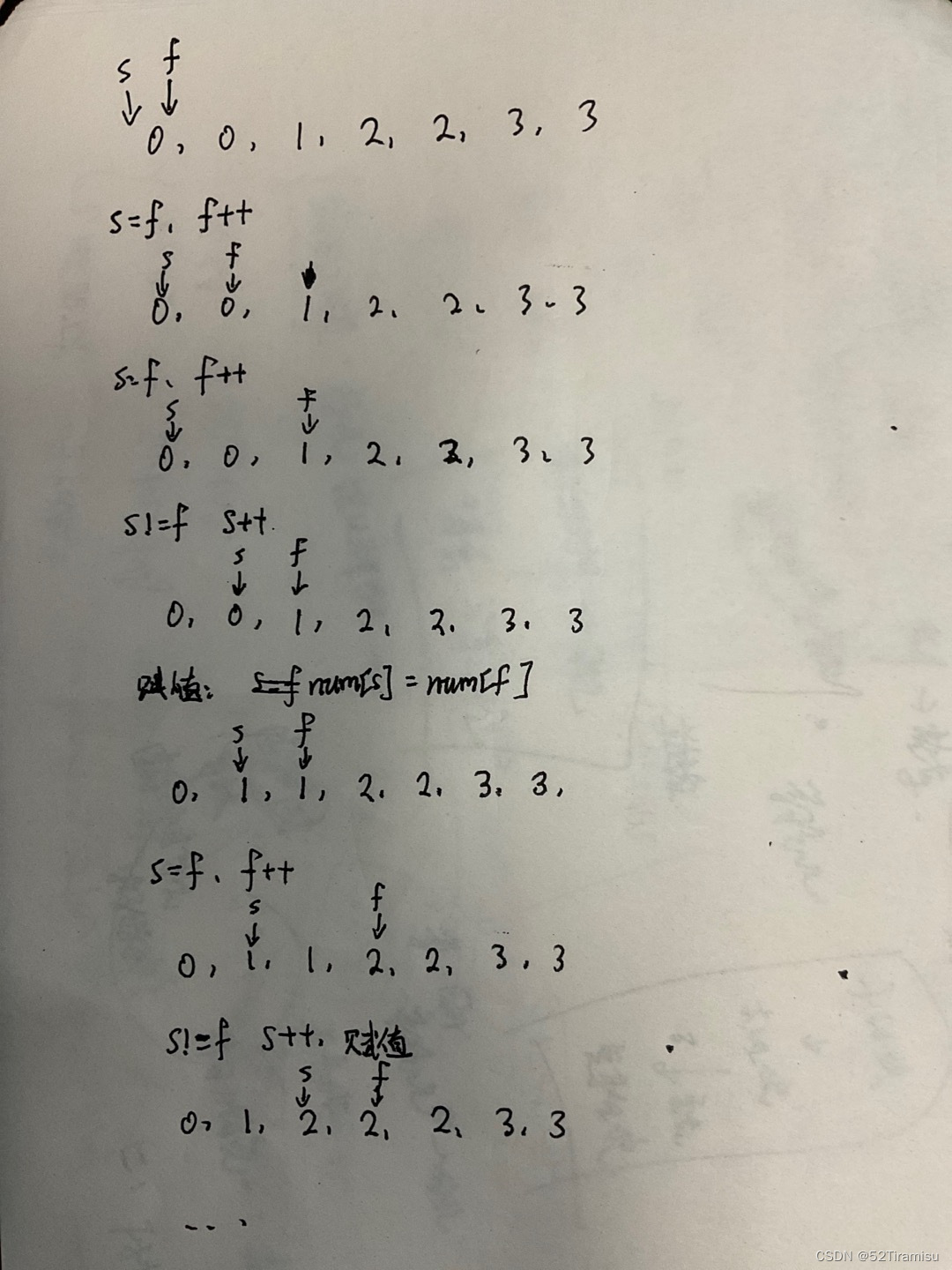
leetcode26-删除有序数组中的重复项
双指针—快慢指针
慢指针 slow 走在后面,快指针 fast 走在前面探路,找到一个不重复的元素的时候就让slow前进一步并赋值给它。
流程: 代码
class Solution {
public:int removeDuplicates(vector<int>& nums) {int slow 0, fas…
为什么都劝年轻人不要频繁跳槽?
"为什么都劝年轻人不要频繁跳槽?"这句话绝对正确,没有任何漏洞,无论如何解释都是正确的,因为“频繁”这个词是非常主观的,有很大的弹性。
不同的人对于跳多少次才算频繁有不同的看法,有人认为一…
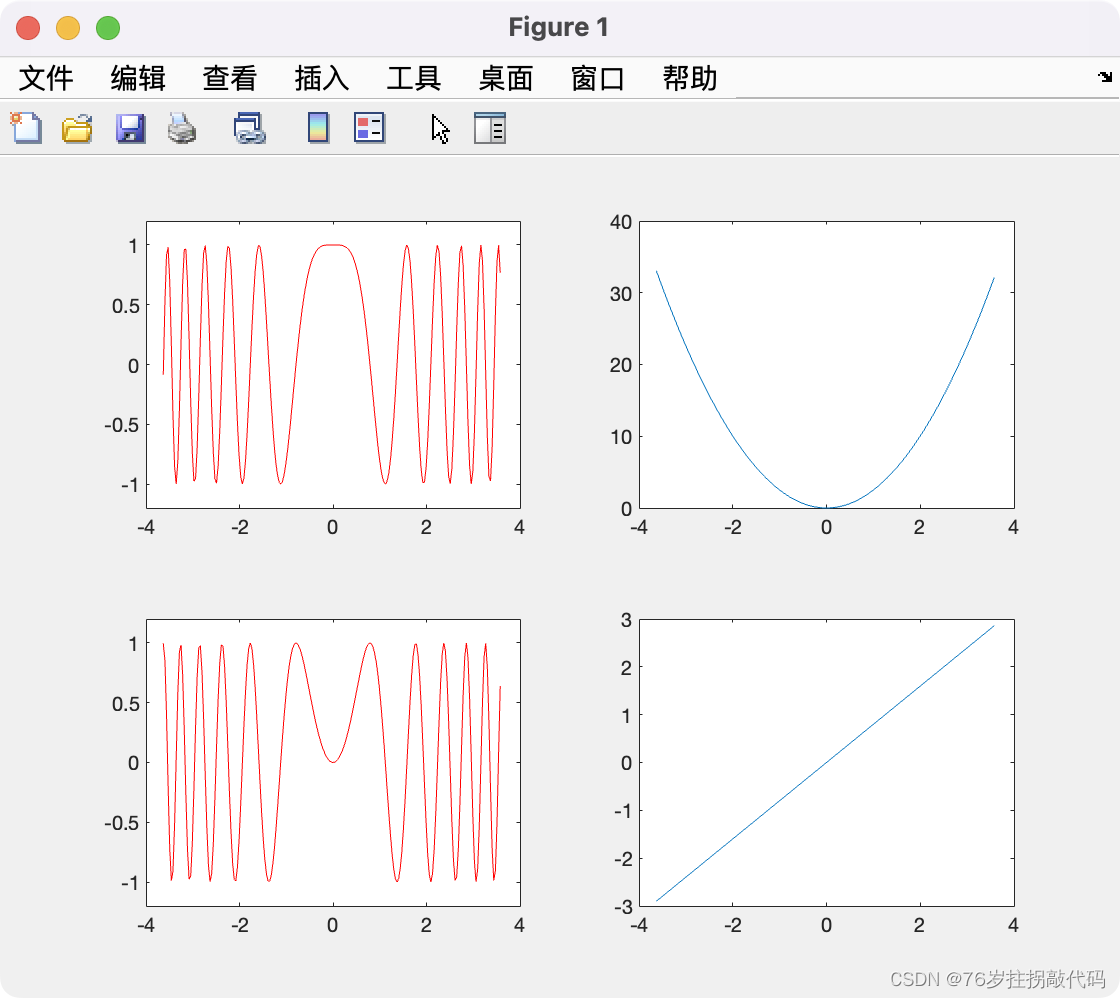
《合成孔径雷达成像算法与实现》Figure3.1
代码复现如下:
clc
close all
clear all%参数设置
B 5.80e6; %信号带宽
T 7.26e-6; %脉冲持续时间
K B/T; %线性调频频率
alpha 5; %过采样率
F alpha*B; %采样频率
N F*T; %采样点数
dt T/N; …
基于最新导则下生态环评报告编制技术暨报告篇、制图篇、指数篇、综合应用篇系统性实践技能提升
查看原文>>>基于最新导则下生态环评报告编制技术暨报告篇、制图篇、指数篇、综合应用篇系统性实践技能提升
目录
专题一、生态环评报告编制规范
专题二、土地利用图
专题三、植被类型及植被覆盖度图
专题四、物种适宜生境分布图
专题五、生物多样性测定
专题六…
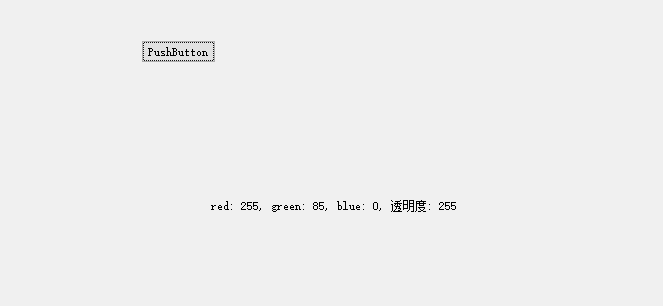
QColorDialog
QColorDialog 颜色类 QColor颜色对话框API简单的使用 QColorDialog类是QDialog的子类, 通过这个类我们可以得到一个选择颜色的对话框窗口
颜色类 QColor
关于颜色的属性信息, 在QT框架中被封装到了一个叫QColor的类中。
各种颜色都是基于红, 绿, 蓝这三种颜色调配而成的, 并…
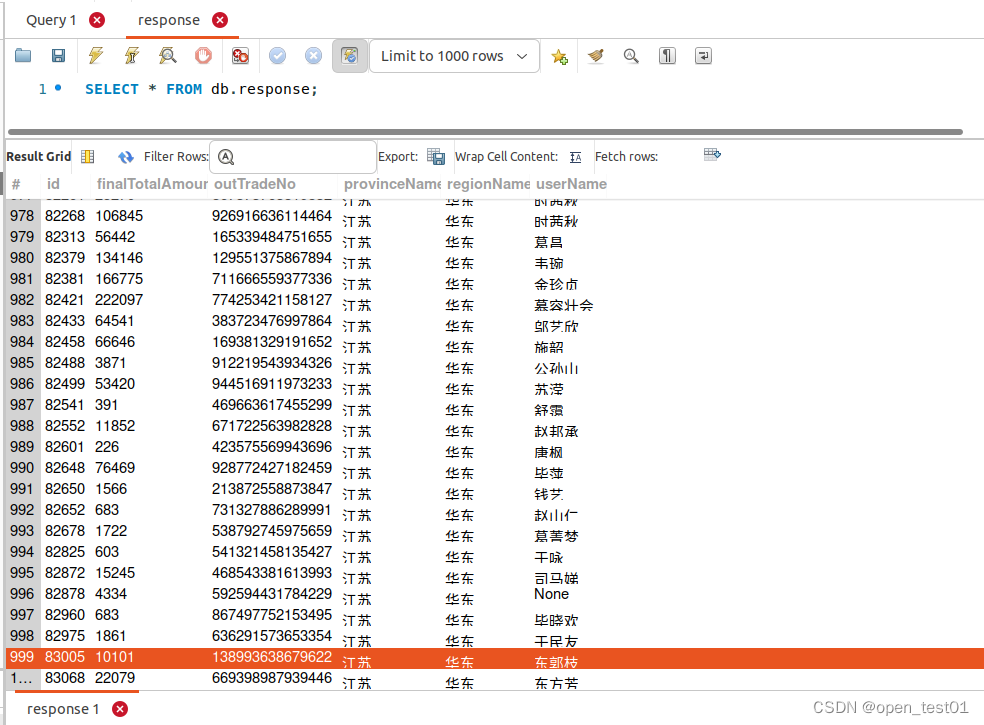
数据请求与导入mysql数据库
端口数据获取与文件保存
文件存入数据库 系统:Ubuntu
工具:Postman,MySql Workbench
端口数据获取与文件保存
打开postman接口测试工具
选择请求方式输入请求地址选择请求参数设置请求参数的格式输入请求参数发送请求 请求成功
选择浏览…
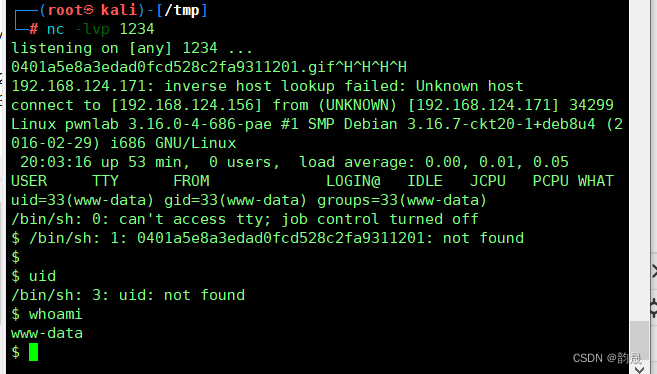
PWNlab靶机渗透
安装靶机
下载地址:https://www/vulnhub.com/entry/pwnlab-init,158/
信息收集:
收集靶机ip地址,由于搭建在本地使用kali自带命令
arp-scan -l nmap 扫描端口,服务
nmap -sV -p 1-65535 -A 靶机ip地址 漏洞探测
访问80端口地…

软件定制开发平台:管好数据资源,降本提质!
在如今的发展时代,利用好优质的软件定制开发平台,定能给广大用户提高办公协作效率,创造可观的市场价值。作为服务商,流辰信息一直在低代码市场勤于钻研,不断努力,保持敏锐的市场眼光和洞察力,为…

用户稳定增长,拆解美团立足于“吃”的刚需价值
近期,QuestMobile发布了《中国移动互联网2023年上半年大报告》。报告显示,上半年,我国移动互联网月人均单日使用时长同比增长7.7%至7.2小时,移动互联网月活用户增长至12.13亿。
尽管在几年前,互联网流量触顶就已经成为…
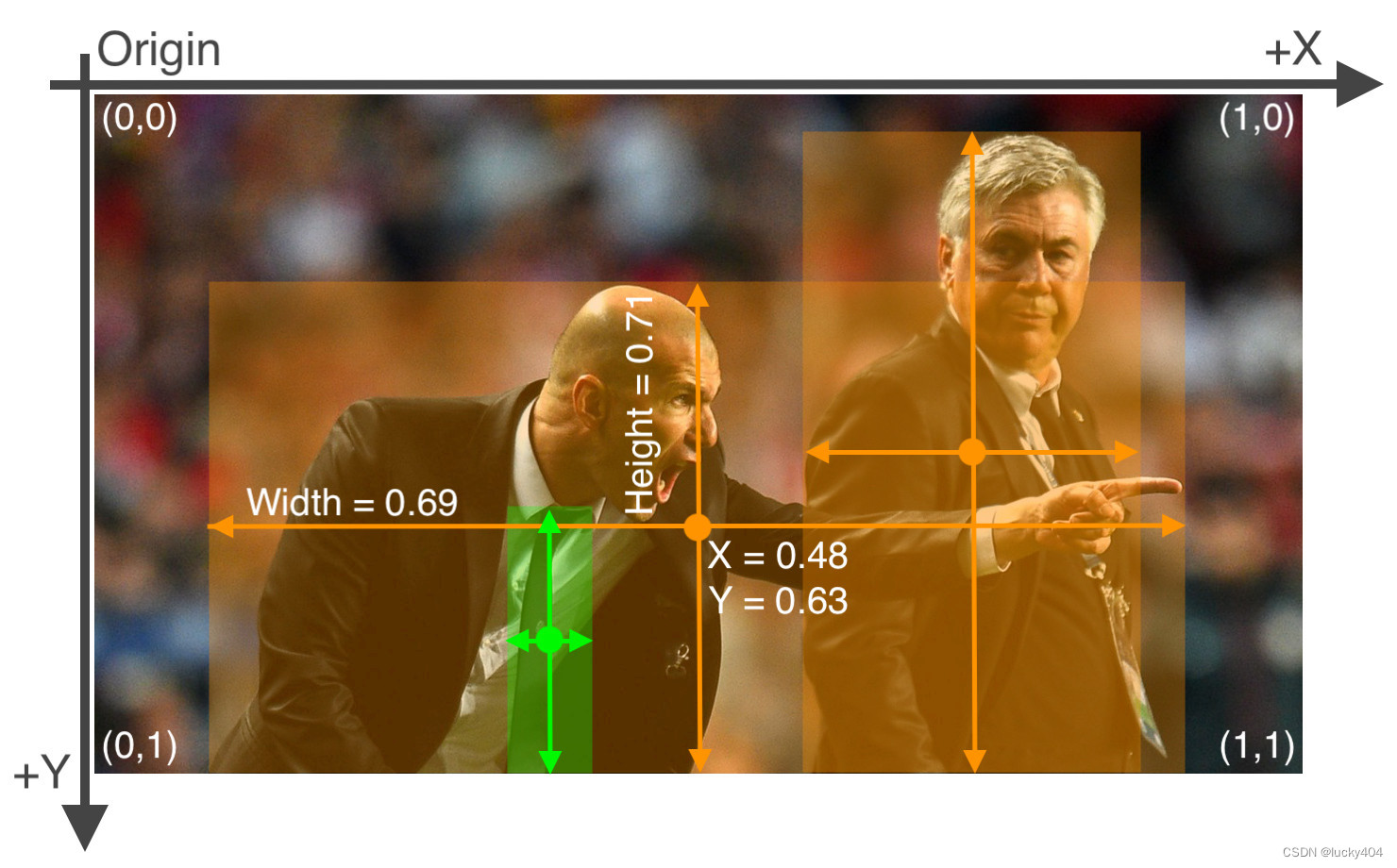
yolo txt 转 labelme json 格式
talk is cheap show me the code!
def convert_txt_to_labelme_json(txt_path, image_path, output_dir, image_fmt.jpg):# txt 转labelme json# 将yolo的txt转labelme jsontxts glob.glob(os.path.join(txt_path, "*.txt"))for txt in txts:labelme_json {versio…