本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/430245.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章


解决GoLand无法Debug
goland 调试的的时候提示如下错误
WARNING: undefined behavior - version of Delve is too old for Go version 1.22.3 (maximum supported v 其实个原因是因为正在使用的Delve调试器版本太旧,无法兼容当前的Go语言版本1.22.3。Delve是Go语言的一个调试工具&#…
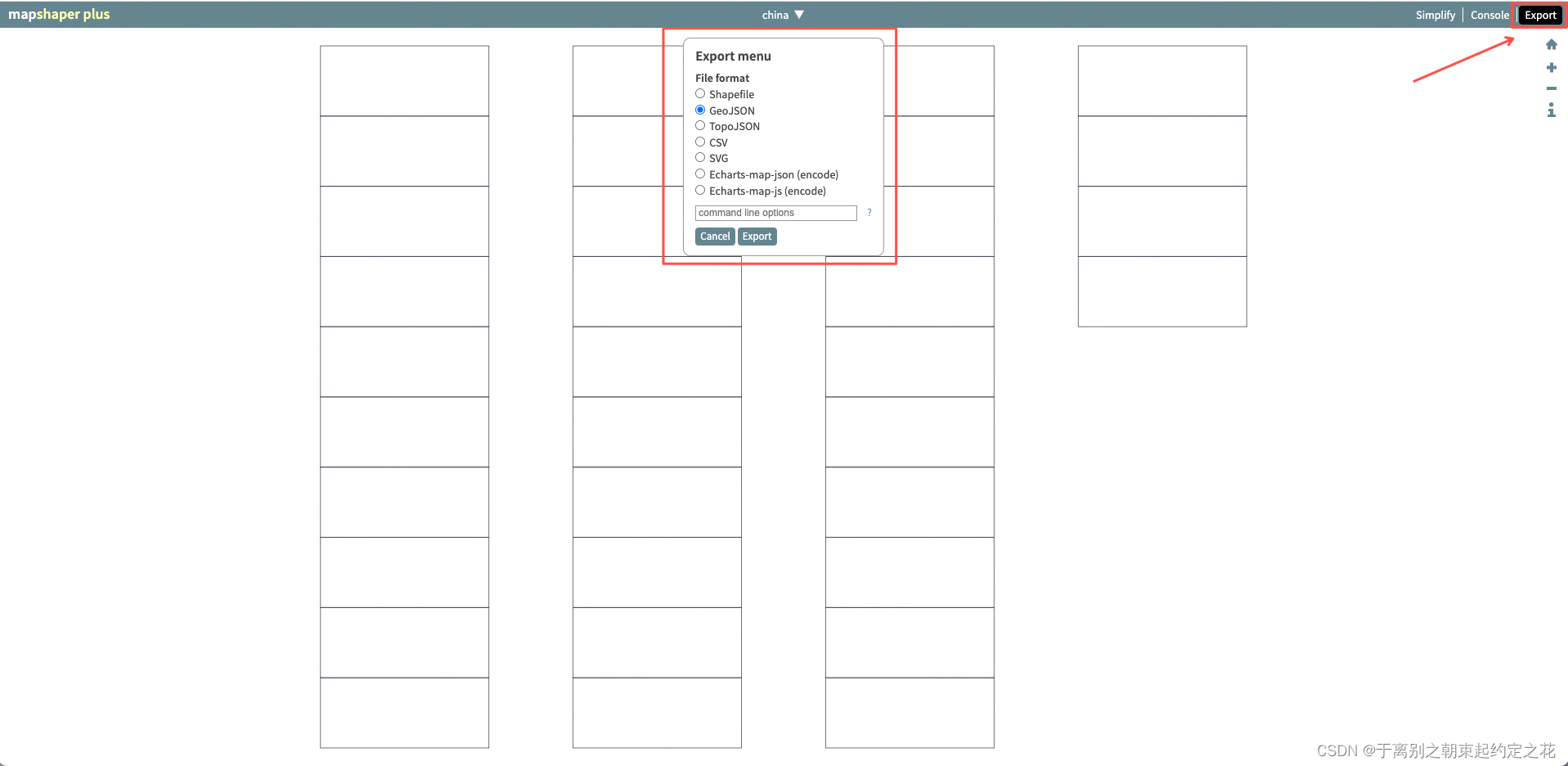
【前端笔记】记录一个能优化Echarts Geo JSON大小的网站
前端在使用Echarts等可视化图表库会不可避免遇到的问题,渲染地图的数据太大。 而有那么一个网站能给予这个问题一个解决方案:链接在此 使用方法很简单,首先先进入网站,如果进入了会是这个页面: 接着,选择一…

Linux文本文件管理003
★排序、去重、统计★
1)排序
sort -n按照数值排序 -r降序排列
2)去重
uniq 过滤相邻、重复的行 -c 对重复行计数
3)统计
wc 统计文件中的字节数、单词数、行数 -l 显示行数
今天通过使用grep、awk、cut指令和上面几个选项提取文本文件…

MongoDB分片集群容灾方案
MongoDB分片集群容灾方案 1. 集群同步工具介绍1.1 第三方数据同步工具mongoshake1.2 官方同步工具mongosync 2. 工具对比2.1 数据一致性2.2 稳定性和可靠性2.3 维护成本 3. 总结 1. 集群同步工具介绍 最近客户咨询MongoDB分片集群市面上主流的容灾方案,所以抽空整理…

Windows hook介绍与代码演示
Windows Hook 是一种机制,允许应用程序监视系统或处理特定事件。它可以拦截和更改消息,甚至可以插入到其他应用程序的消息处理机制中。Windows 提供了多种挂钩类型,例如键盘挂钩、鼠标挂钩、消息挂钩等。
hook代码实现
下面是一个使用 Wind…

前端Vue小兔鲜儿电商项目实战Day01
一、项目介绍
1. 项目技术栈 2. 项目规模 3. 项目亮点 4. 课程安排 5. 适合人群 二、Vue3组合式API体验
1. 通过一个Counter案例体验Vue3新引入的组合式API
①Vue2的代码
<template><button click"addCount"> {{ count }}</button>
</templ…

【项目】教你手把手完成博客系统(三)显示用户信息 | 实现退出登录 | 实现发布博客
文章目录 教你手把手完成博客系统(三)7.实现显示用户信息1.约定前后端交互接口2.前端通过ajax发起请求3.服务器处理请求 8.实现退出登录1.约定前后端的接口2.前端发起请求3.服务器处理请求 9.实现发布博客1.约定前后端的交互接口2.前端构造请求3.服务器处…

nginx设置一个TCP代理(用于RDP连接)
在 Nginx 中,stream 上下文必须在 http 上下文之外,并且只能位于顶级配置文件中或包含在主配置文件中的单独文件中。
Nginx 的配置文件通常包含一个 http 块,用于处理 HTTP 和 HTTPS 请求,但是 stream 块是独立的,并且…
4个月赚20万!一张图赚7500!多种变现方式,一个被忽视的暴力项目
大家好,今天给大家带来一个被很多人忽视,不起眼确很暴力的项目。
大胆放心干
课程获取:
https://hsgww.com/https://hsgww.com/

OrangePi AIpro (8T)使用体验,性能测试报告
前言
这段时间收到了CSDN和香橙派的邀请,对OrangePi AIpro进行体验测评,在此感谢CSDN对我的信任,也感谢香橙派能做出如此优秀的开发板。
可喜可贺,周三晚上我收到了官方寄出的OrangePi AIpro。出于对国产芯片的好奇,…
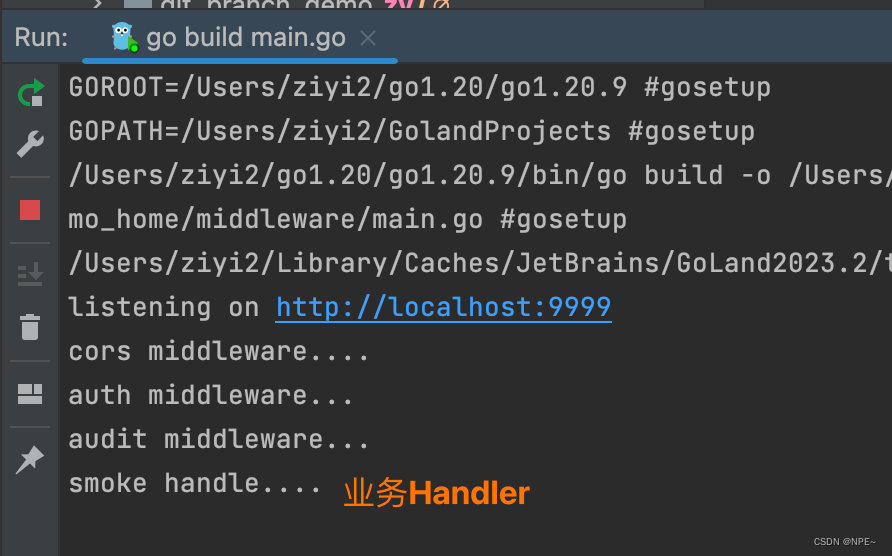
Golang原生http实现中间件
Golang原生http实现中间件 中间件(middleware):常被用来做认证校验、审计等 大家常用的Iris、Gin等web框架,都包含了中间件逻辑。但有时我们引入该框架显得较为繁重,本文将介绍通过golang原生http来实现中间件操作。全…

随笔(二)——项目代码优化
文章目录 前言一、传入的props的默认值定义为空数组1.问题(提示对象的类型为unknwn)2.优化 二、document 上不存在xxx属性1.问题2.做了一个兼容浏览器的关闭全屏方法3. 解决方法 (使用declare globa设置全局变量类型)(…
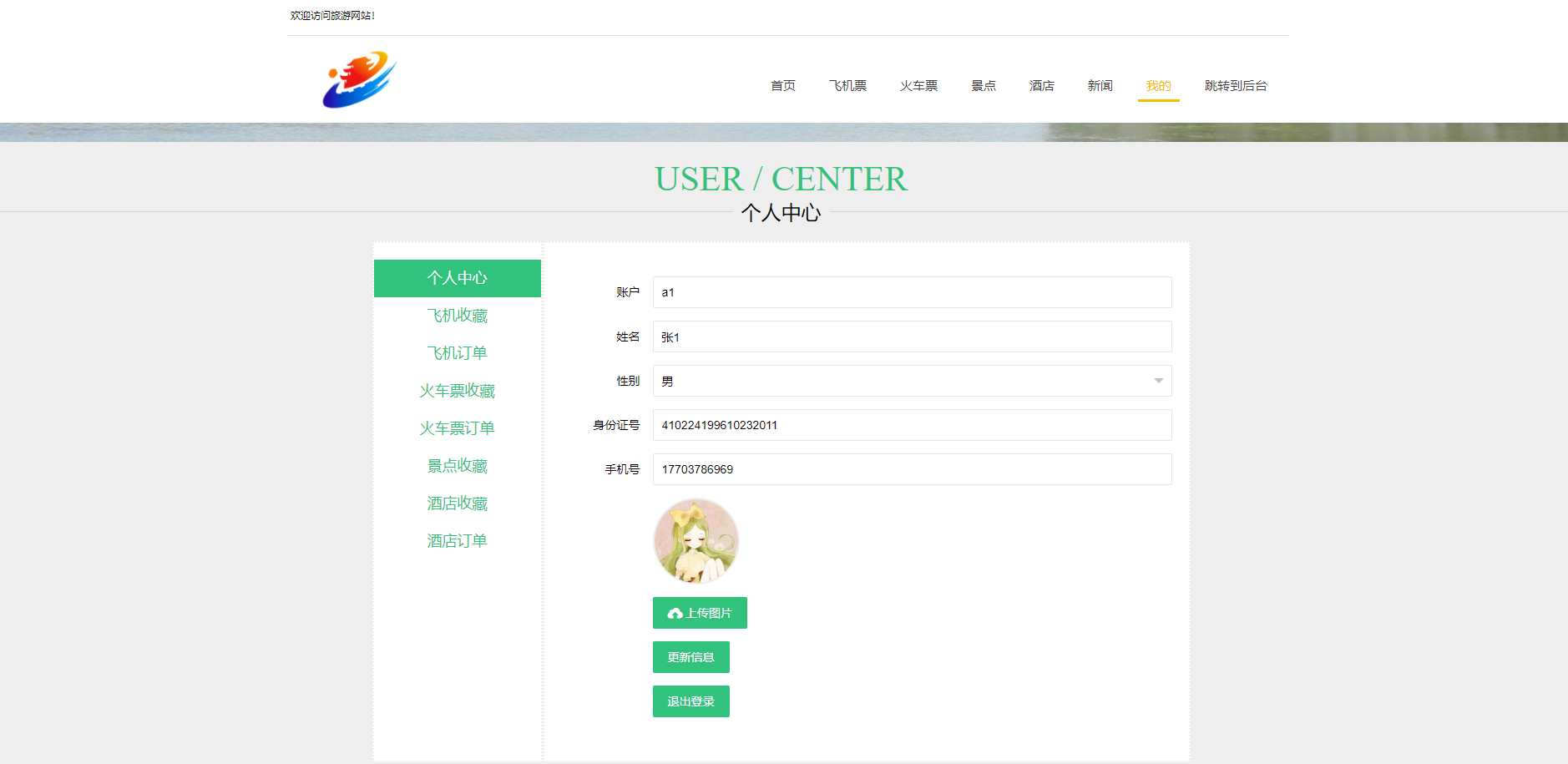
ssm150旅游网站的设计与实现+jsp
旅游网站设计与实现
摘 要
现代经济快节奏发展以及不断完善升级的信息化技术,让传统数据信息的管理升级为软件存储,归纳,集中处理数据信息的管理方式。本旅游网站就是在这样的大环境下诞生,其可以帮助管理者在短时间内处理完毕庞…

【前端学习笔记】HTML基础
HTML 一、HTML介绍1.HTML概念2.文档声明3.字符编码4. HTML标签5. HTML属性 二、标签1.meta标签2.语义标签3.布局标签4.列表5.超链接6.图片7.字符实体8.内联格式9.HTML 表格10.HTML 表单 三、HTML5新特性1. 本地存储2. Cookie3. 语义化标签4.多媒体元素5.表单增强6.Canvas7.SVG …


后端企业级开发之yaml数据序列化格式文件详解2024
yaml格式 数据格式
yaml 是一种数据序列化的格式
容易阅读 容易与脚本语言交互 以数据为核心 重数据轻格式
我们要知道他怎么书写 大小写敏感
属性层级关系使用多行描述 每行结尾使用冒号结束
使用缩进表示层级关系
同层级左侧对其 只运行使用空格
属性前面添加空格
#表…

栈的特性及代码实现(C语言)
目录 栈的定义
栈的结构选取
链式储存结构和顺序栈储存结构的差异
栈的代码实现
"stack.h"
"stack.c"
总结 栈的定义
栈:栈是限定仅在表尾进行插入和删除操作的线性表。
我们把运行插入的和删除的一段叫做栈顶(TOPÿ…

什么是erp仓储管理系统?ERP系统的价值体现在哪些方面?
ERP仓储管理系统是一个帮助企业管理仓库的工具。想象一下,如果你是一个仓库管理员,里面堆满了各种各样的产品和货物,如何确保这些产品数量准确、摆放有序,以及快速找到自己需要的产品呢?
这时,如果企业引用…

qmt量化交易策略小白学习笔记第8期【qmt编程之获取股票资金流向数据--内置Python】
qmt编程之获取股票资金流向数据
qmt更加详细的教程方法,会持续慢慢梳理。
也可找寻博主的历史文章,搜索关键词查看解决方案 !
感谢关注,需免费开通量化回测与咨询实盘权限,可以和博主联系!
获取股票资金…