本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/95423.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
文案生成器-文章生成器
你是否曾经面对过频繁写作文案的问题?是不是觉得文案的撰写过程既繁琐又耗时?那么今天我要向你介绍一项令人兴奋的技术——文案自动生成。是的,现在我们可以借助人工智能技术,自动生成高质量的文案,为你在营销和推广方…
【Apollo】开启Apollo之旅:让自动驾驶如此简单
前言
Apollo 是百度公司推出的自动驾驶平台。它是一个综合性的自动驾驶解决方案,提供了包括感知、决策、规划和控制等核心功能,以及地图、定位、仿真、数据管理等配套工具。 文章目录 前言Apollo 的发展历程Apollo 8.0新特性软件包管理感知框架工具链小…

Linux命令200例:man用于显示和阅读关于Linux内置命令的使用说明
🏆作者简介,黑夜开发者,CSDN领军人物,全栈领域优质创作者✌。CSDN专家博主,阿里云社区专家博主,2023年6月csdn上海赛道top4。 🏆数年电商行业从业经验,历任核心研发工程师࿰…
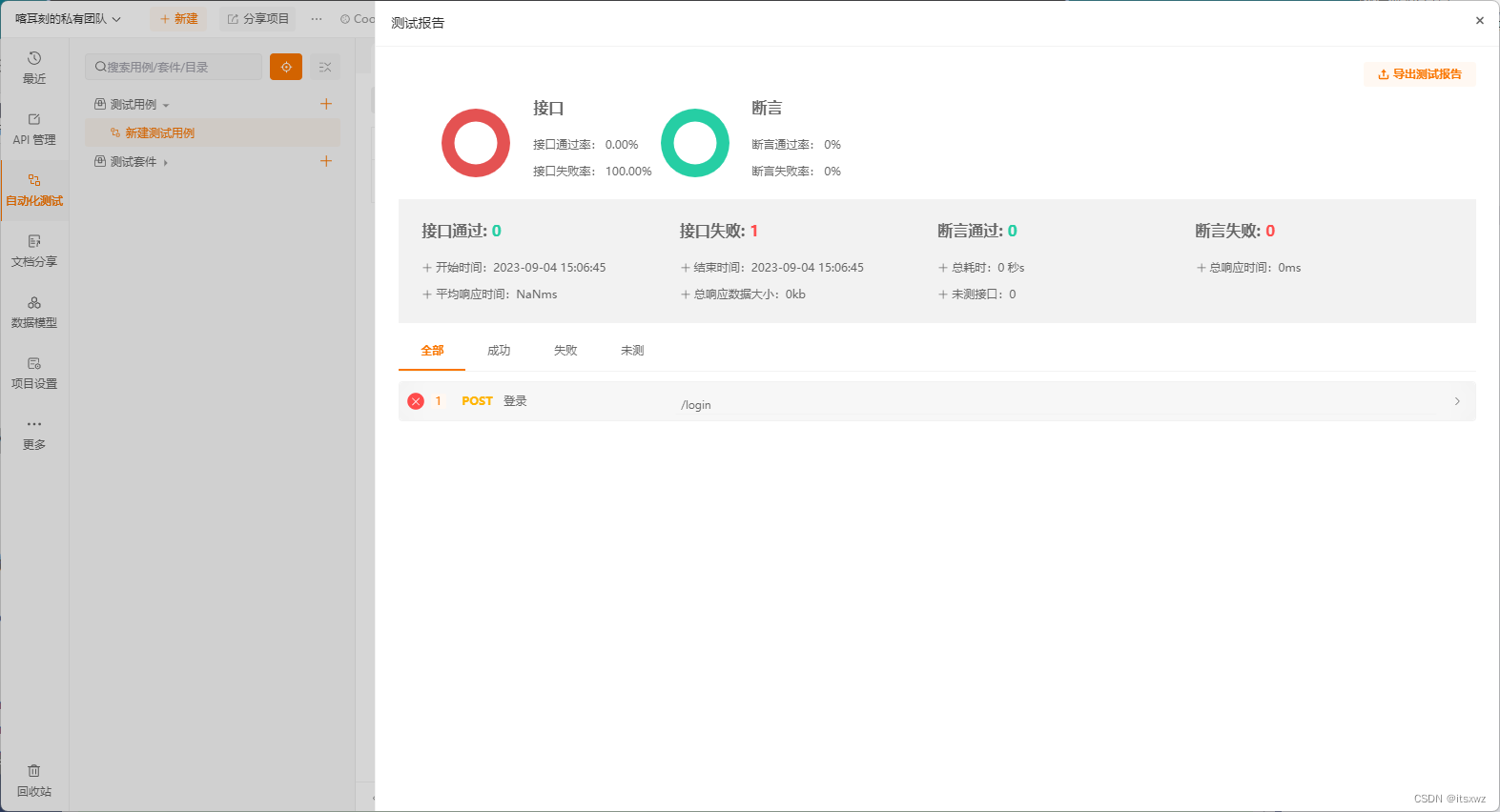
ApiPost7使用介绍 | HTTP Websocket
一、基本介绍
创建项目(团队下面可以创建多个项目节点,每个项目可以创建多个接口): 参数描述库(填写参数时自动填充描述): 新建环境(前置URL、环境变量很有用)&#x…
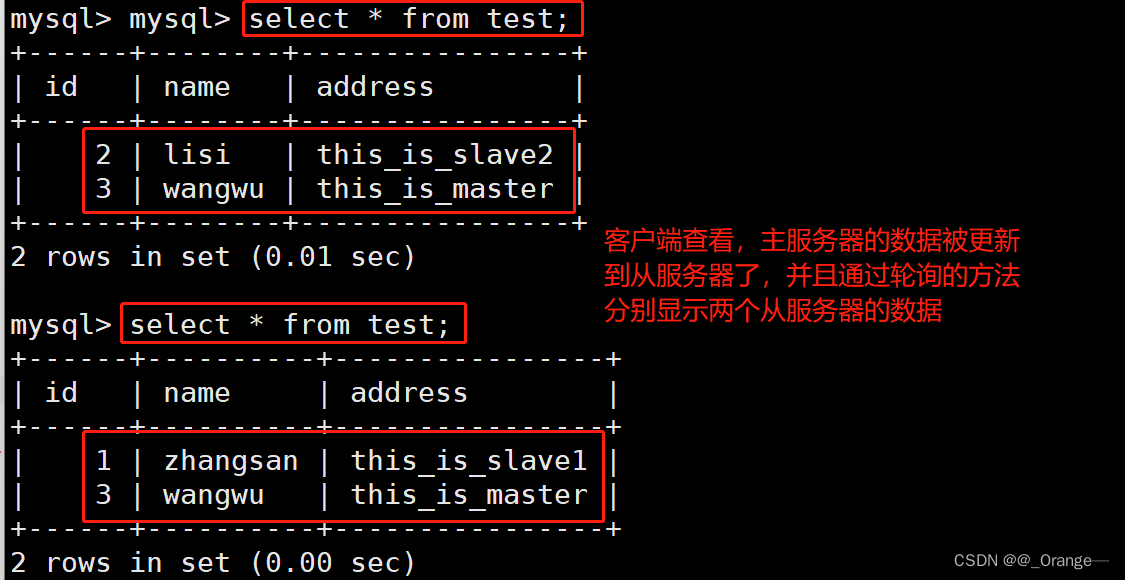
MySQL主从复制和读写分离搭建
目录
一、主从复制原理
1、MySql支持从复制类型 2、主从复制的原理⭐⭐⭐
4、mysql主从复制延迟
异步、同步、半同步复制: 二、主从复制实验
1、mysql 时间同步
1.1 主服务设置被同步的时间
1.2 两台从服务器设置时间同步(两台服务器一样配置&am…
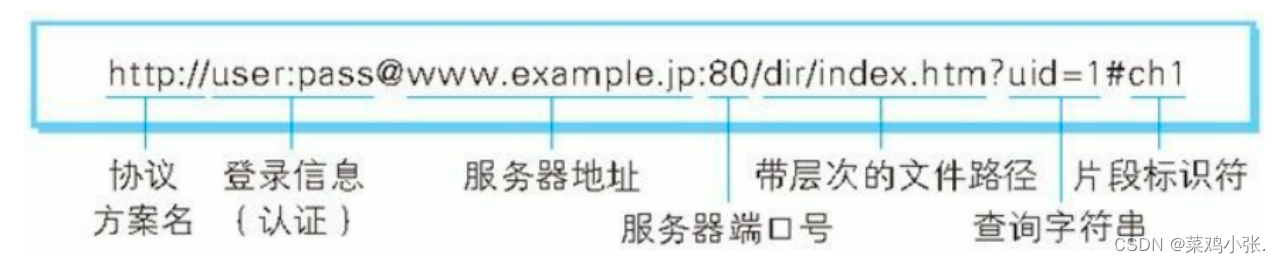
计算机网络的故事——了解Web及网络基础
了解Web及网络基础 文章目录 了解Web及网络基础一、使用 HTTP 协议访问 Web二、HTTP 的诞生三、网络基础 TCP/IP四、与 HTTP 关系密切的协议 : IP、TCP 和 DNS 一、使用 HTTP 协议访问 Web
根据Web浏览器指定的URL,从对应的服务器中获取文件资源,从而显…
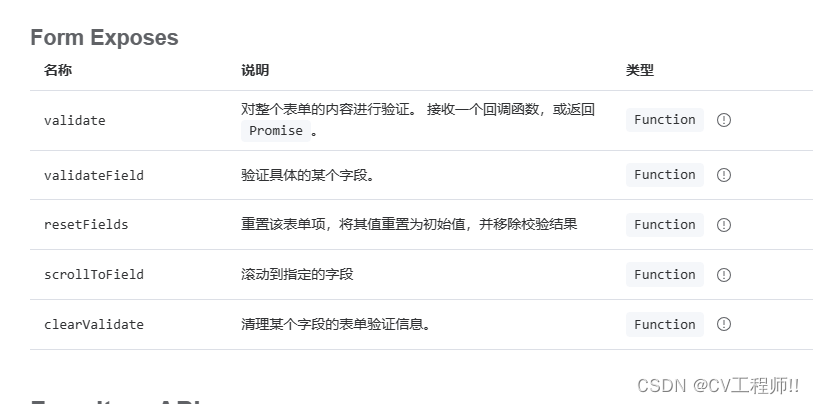
vue3 搭配ElementPlus做基础表单校验 自定义表单校验
<script setup>
import { ref, reactive } from vue// 表单元素
const dom ref(null)
// 校验规则
const rules {name: [{ required: true, message: 请输入活动名称, trigger: blur }],//校验手机号格式phone: [{ required: true, message: "请输入电话", t…
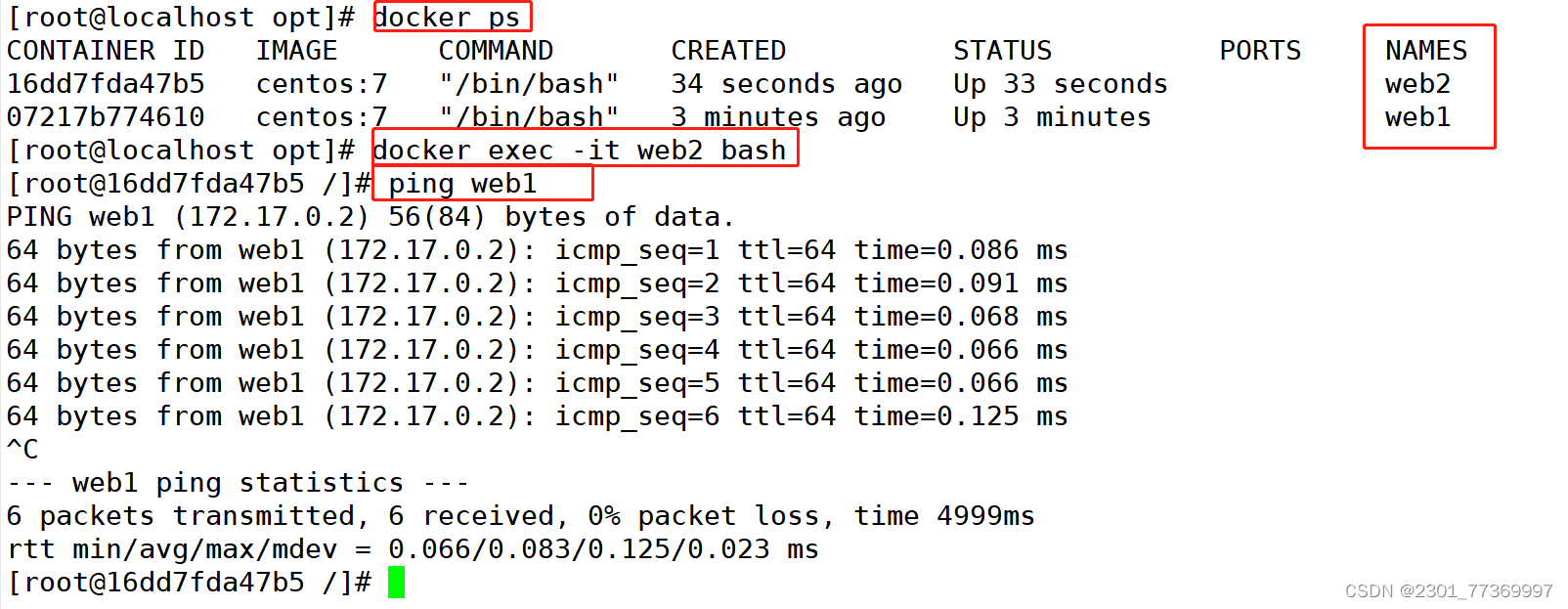
Docker的数据管理(持久化存储)
文章目录 一、概述二、数据卷三、数据卷容器四、端口映射五、容器互联(使用centos镜像)总结 一、概述
管理 Docker 容器中数据主要有两种方式:数据卷(Data Volumes)和数据卷容器(DataVolumes Containers&a…

使用Puppeteer进行游戏数据可视化
导语
Puppeteer是一个基于Node.js的库,可以用来控制Chrome或Chromium浏览器,实现网页操作、截图、测试、爬虫等功能。本文将介绍如何使用Puppeteer进行游戏数据的爬取和可视化,以《英雄联盟》为例。
概述
《英雄联盟》是一款由Riot Games开…
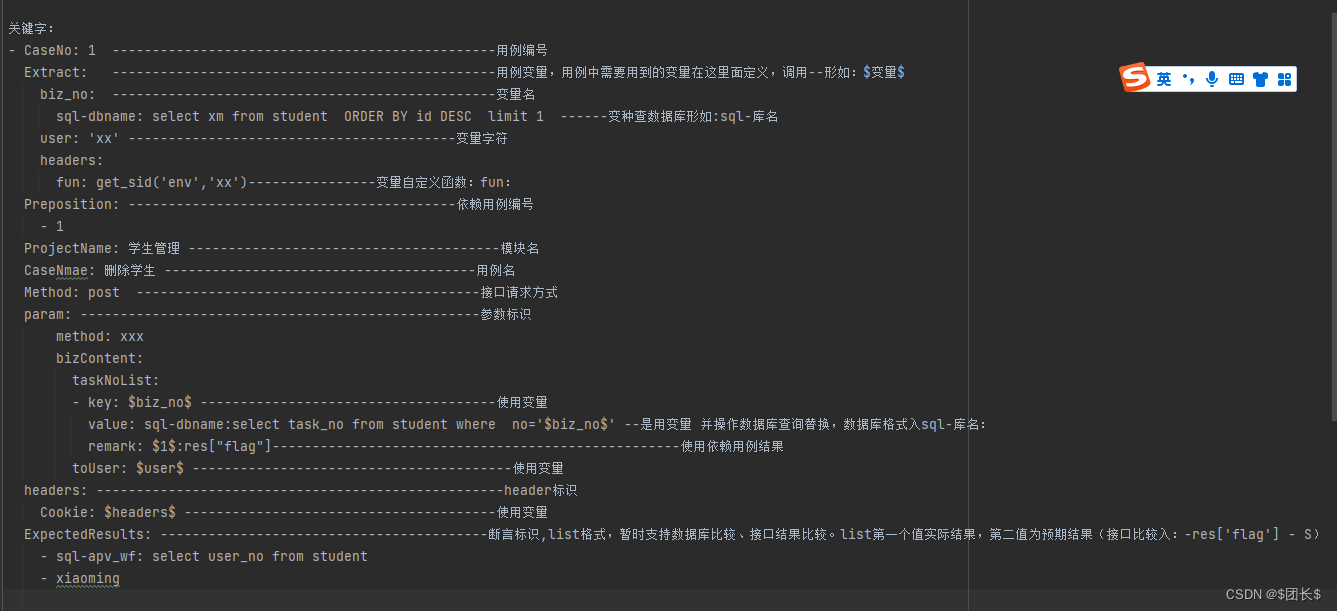
接口自动化测试系列-yml管理测试用例
项目源码
目录结构及项目介绍
整体目录结构,目录说明参考 测试用例结构类似httprunner写法,可参考demo 主要核心函数 用例读取转换json
import yaml
import main
import os
def yaml_r():curpath f{main.BASE_DIR}/quality_management_logic/ops_ne…
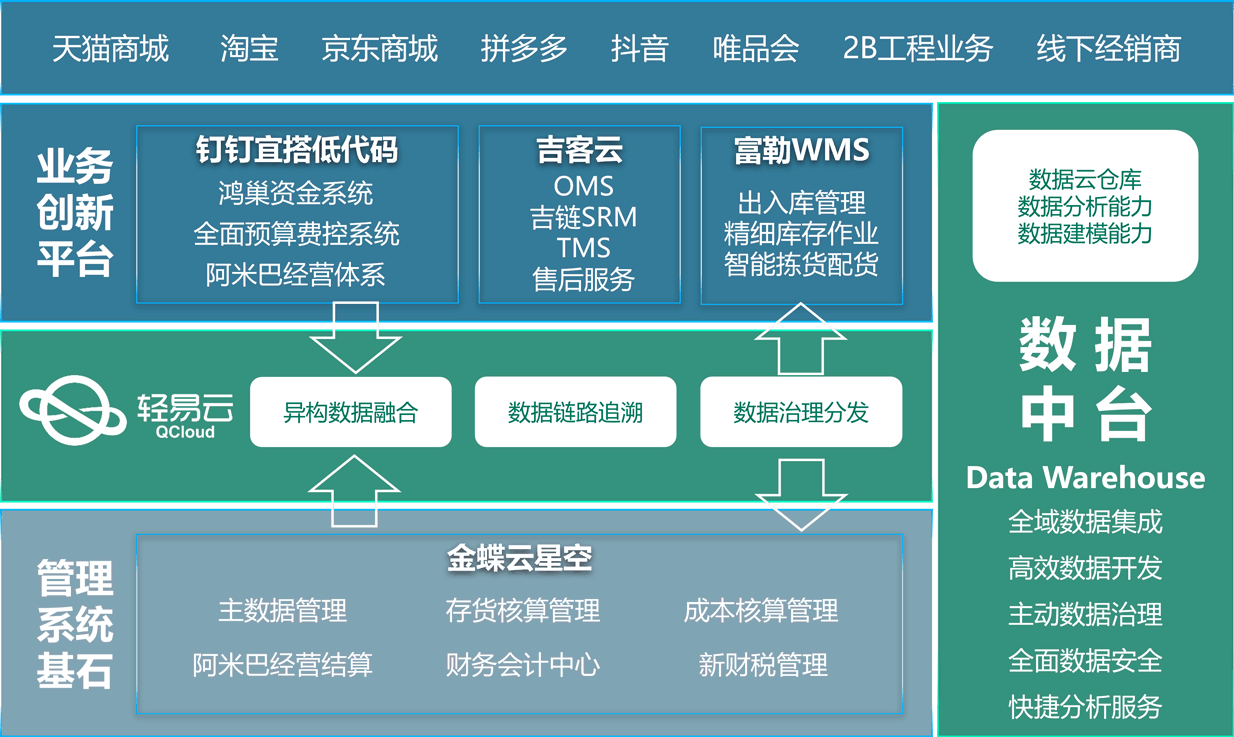
金蝶云星空和金蝶云星空单据接口对接
金蝶云星空和金蝶云星空单据接口对接 接入系统:金蝶云星空 金蝶K/3Cloud(金蝶云星空)是移动互联网时代的新型ERP,是基于WEB2.0与云技术的新时代企业管理服务平台。金蝶K/3Cloud围绕着“生态、人人、体验”,旨在帮助企业…
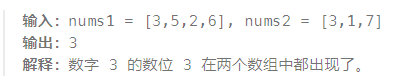
2023-09-05 LeetCode每日一题(从两个数字数组里生成最小数字)
2023-09-05每日一题
一、题目编号
2605. 从两个数字数组里生成最小数字二、题目链接
点击跳转到题目位置
三、题目描述
给你两个只包含 1 到 9 之间数字的数组 nums1 和 nums2 ,每个数组中的元素 互不相同 ,请你返回 最小 的数字,两个数…

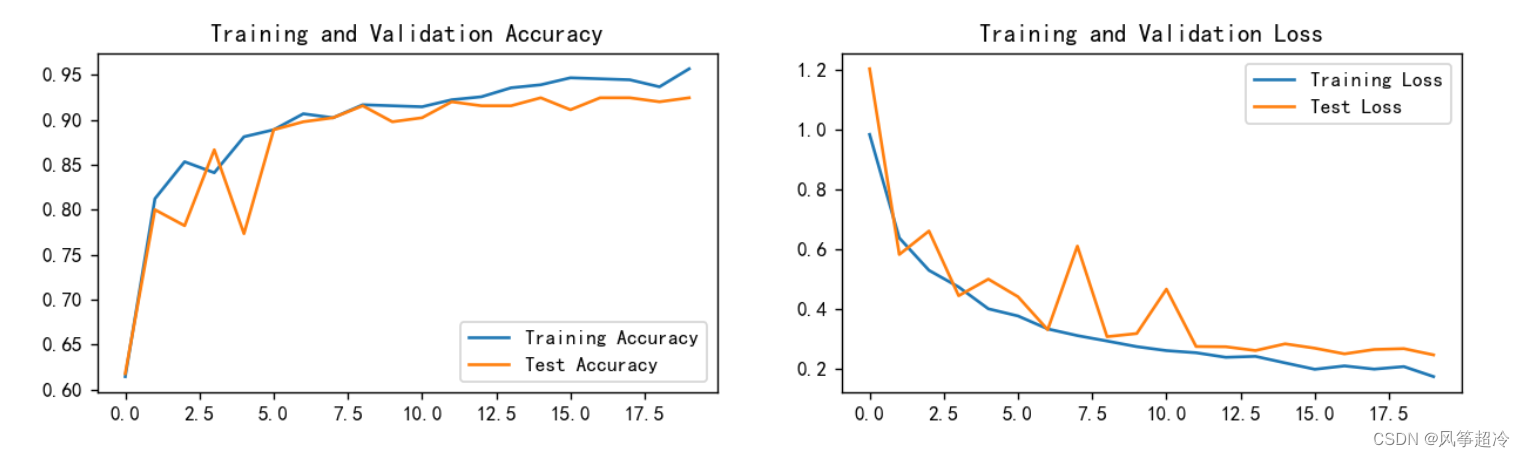
基于Pytorch构建Faster-RCNN网络进行目标检测(一)
尽管R-CNN是物体检测的鼻祖,但其实最成熟投入使用的是faster-RCNN,而且在pytorch的torchvision内置了faster-RCNN模型,当然还内置了mask-RCNN,ssd等。既然已经内置了模型,而且考虑到代码的复杂度,我们也无需…

关于el-input和el-select宽度不一致问题解决
1. 情景一
单列布局 对于上图这种情况,只需要给el-select加上style"width: 100%"即可,如下:
<el-select v-model"fjForm.region" placeholder"请选择阀门类型" style"width: 100%"><el-o…
1.1 计算机网络在信息时代中的作用
思维导图: 正文: 我的理解:
这段话是一本书或课程的第一章简介,它的目的是为读者或学生提供一个关于计算机网络基础知识的框架或大纲。
首先,它强调了这章是整本书的一个概览,会先介绍计算机网络在信息时…
Day 39 动态规划part02 : 62.不同路径 63. 不同路径 II
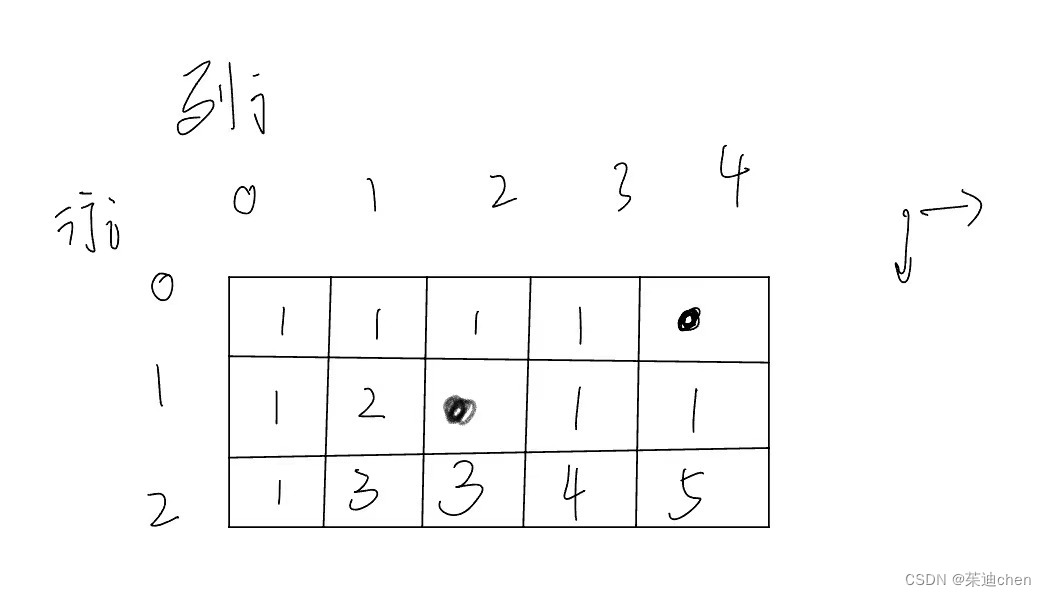
62. 不同路径 一个机器人位于一个 m x n 网格的左上角 (起始点在下图中标记为 “Start” )。 机器人每次只能向下或者向右移动一步。机器人试图达到网格的右下角(在下图中标记为 “Finish” )。 问总共有多少条不同的路径…

MediaBox助力企业一站式获取音视频能力
以一只音视频百宝箱,应对「千行千面」。 洪炳峰、楚佩斯|作者
大家好,今天我分享的主题是MediaBox——行业音视频数字化再加速。
根据权威数据表明,65%的行业数字化信息来自视频,基于此,音视频技术对于行…
面试题查漏补缺 i++和 ++ i哪个效率更高
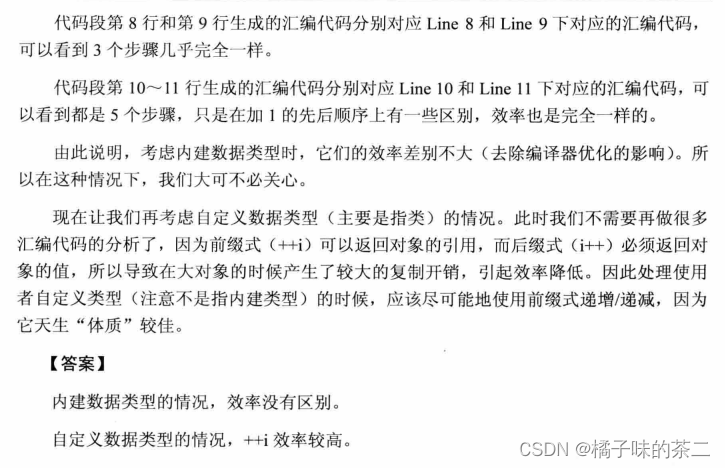
i 和 i 哪个效率更高? 在这里声明,简单地比较前缀自增运算符和后缀自增运算符的效率是片面的,因为存在很多因素影响这个问题的答案。首先考虑内建数据类型的情况:如果自增运算表达式的结果没有被使用,而是仅仅简单地用于增加一员…