本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/174426.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
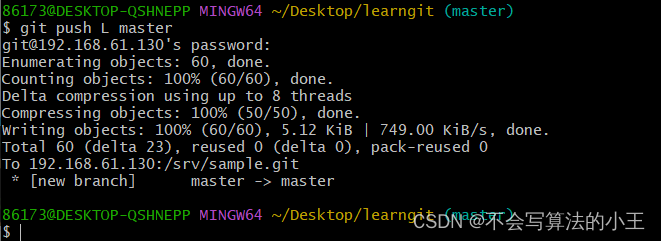
完整搭建Git服务器
文章目录 搭建Git服务器第一步,安装git:第二步,创建一个git用户,用来运行git服务第三步,添加SSH公钥第四步,初始化Git仓库:第五步,连接Git服务器 搭建Git服务器
GitHub就是一个免费…
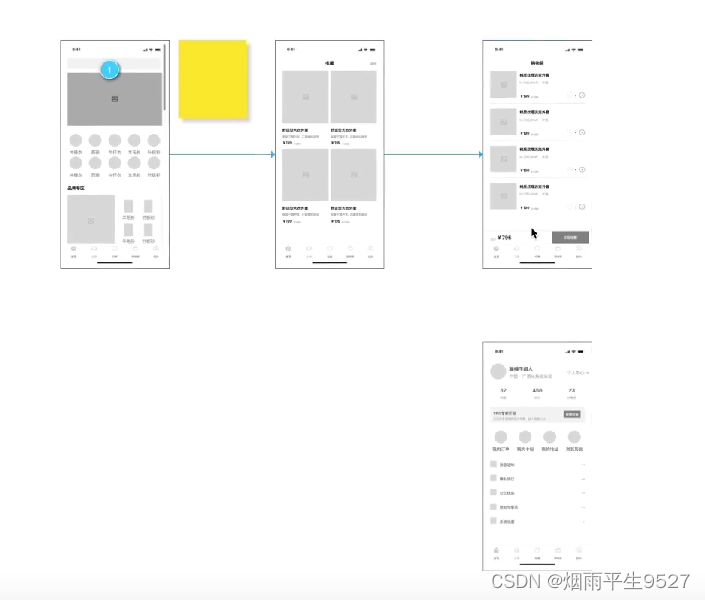
工具篇之Axure RP 10的使用
引言
最近在学习原型图,针对画原型图的工具,反复对比墨刀、Axure、xiaopiu后,最终选择Axure。
接下来,我便从Axure RP 10的下载、安装、中文字体、授权等几个方面,来介绍Axure。
一、背景 Axure是一款强大的原型设计…

CSS 基础知识-01
CSS 基础知识 1.CSS概述2. CSS引入方式3. 选择器4.文字控制属性5. 复合选择器6. CSS 特性7.背景属性8.显示模式9.选择器10.盒子模型 1.CSS概述 2. CSS引入方式 3. 选择器 4.文字控制属性 5. 复合选择器 6. CSS 特性 7.背景属性 8.显示模式 9.选择器 <!DOCTYPE html>
<…

平板有必要买触控笔吗?推荐的ipad手写笔
iPad之所以能吸引这么多人,主要是因为它的功能出色。用来画画、做笔记,也是一种不错的体验。但如果只是用来看电视和打游戏的话,那就真的有点大材小用了。如果你不需要昂贵的苹果电容笔,也不需要用来专业的绘图,那你可…
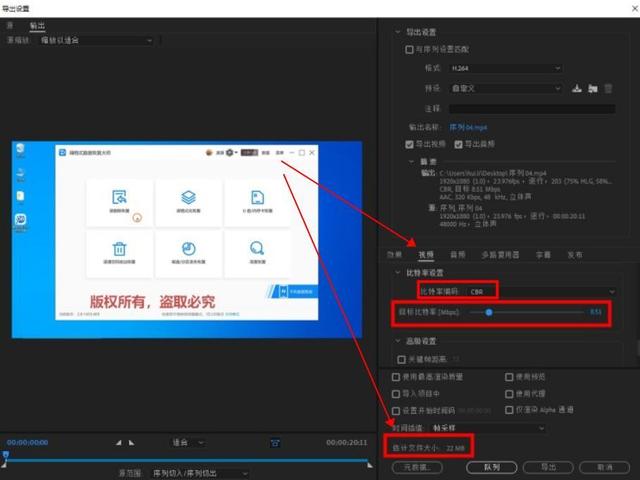
视频怎么压缩?视频过大这样压缩变小
在日常生活中,我们常常会遇到需要压缩视频的情况,视频压缩不仅可以减小文件大小,方便存储和传输,还可以在保证质量的同时,满足不同的使用需求。那么,如何有效地压缩视频呢? 方法一:嗨…
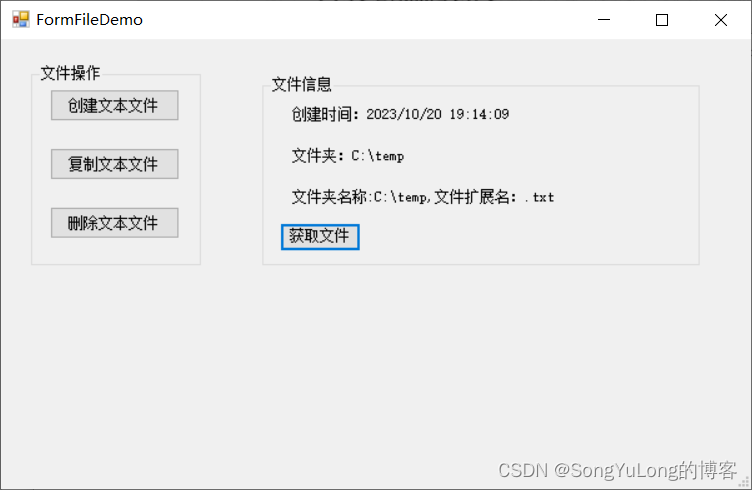
C# Winform编程(7)文件处理技术
文件处理技术 System.IO命名空间File类的常用方法FileInfo类的常用方法文件夹类Directory的常用方法 System.IO命名空间
System.IO命名空间常用的类
类说明File提供用于创建,复制,删除,移动和打开文件的静态方法,并协助创建File…
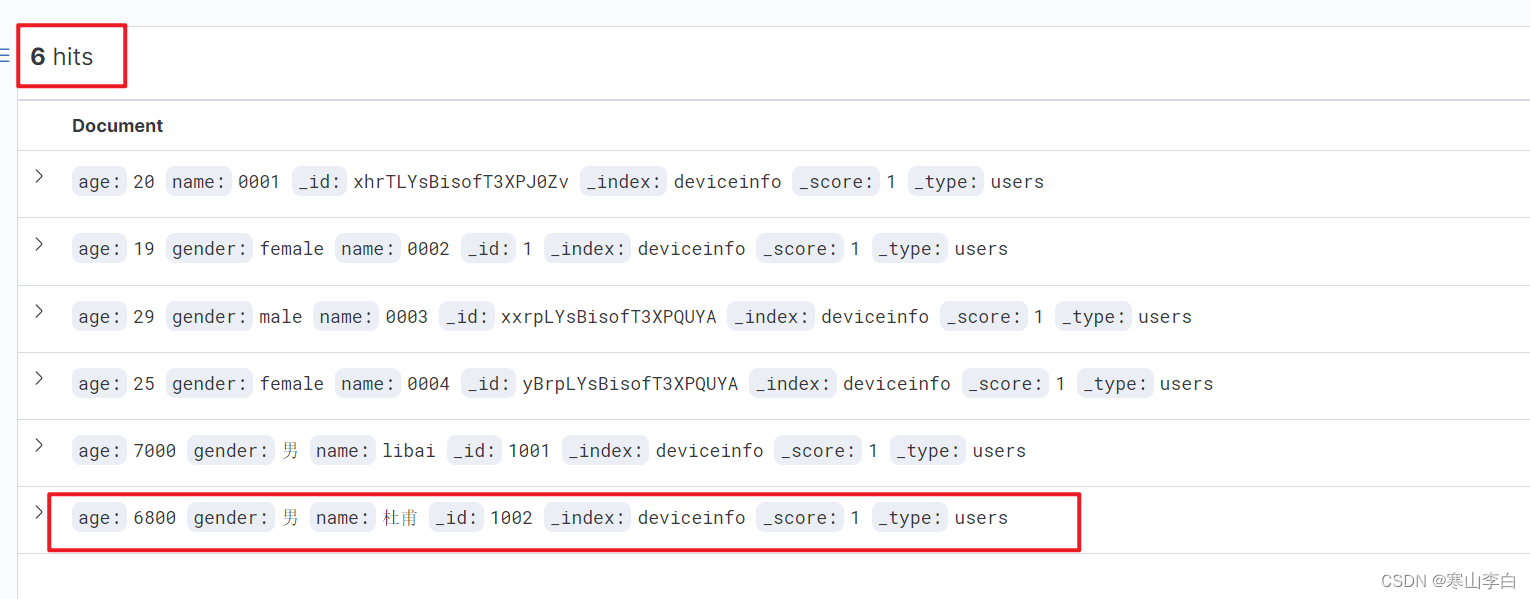
Java操作Elasticsearch(新增数据)
天行健,君子以自强不息;地势坤,君子以厚德载物。 每个人都有惰性,但不断学习是好好生活的根本,共勉! 文章均为学习整理笔记,分享记录为主,如有错误请指正,共同学习进步。…

Redis在分布式场景下的应用
分布式缓存 缓存的基本作用是在高并发场景下对应服务的保护缓冲 – 基于Redis集群解决单机Redis存在的问题
单机的Redis存在四大问题:
redis由于高强度性能采用内存 但是意味着丢失的风险单结点redis并发能力有限分布式服务中数据过多 依赖内存的redis 明显单机不…
Coreldraw2020最新64位电脑完整版本下载教程
安装之前所有的杀毒软件都要退出。无论是360,腾讯管家,或者电脑自带的安全中心,要不然会阻止安装。
CorelDRAW2020版win下载如下:https://wm.makeding.com/iclk/?zoneid55678
CorelDRAW2020版mac下载如下:https://wm.makeding.com/iclk/?…
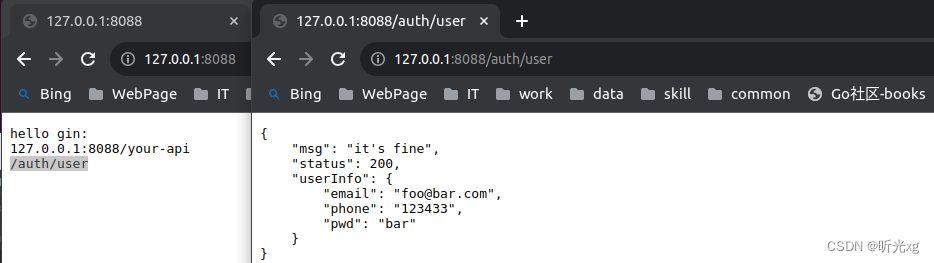
gin框架39--重构 BasicAuth 中间件
gin框架39--重构 BasicAuth 中间件 介绍gin BasicAuth 解析自定义newAuth实现基础认证注意事项说明 介绍
每当我们打开一个网址的时候,会自动弹出一个认证界面,要求我们输入用户名和密码,这种BasicAuth是最基础、最常见的认证方式࿰…
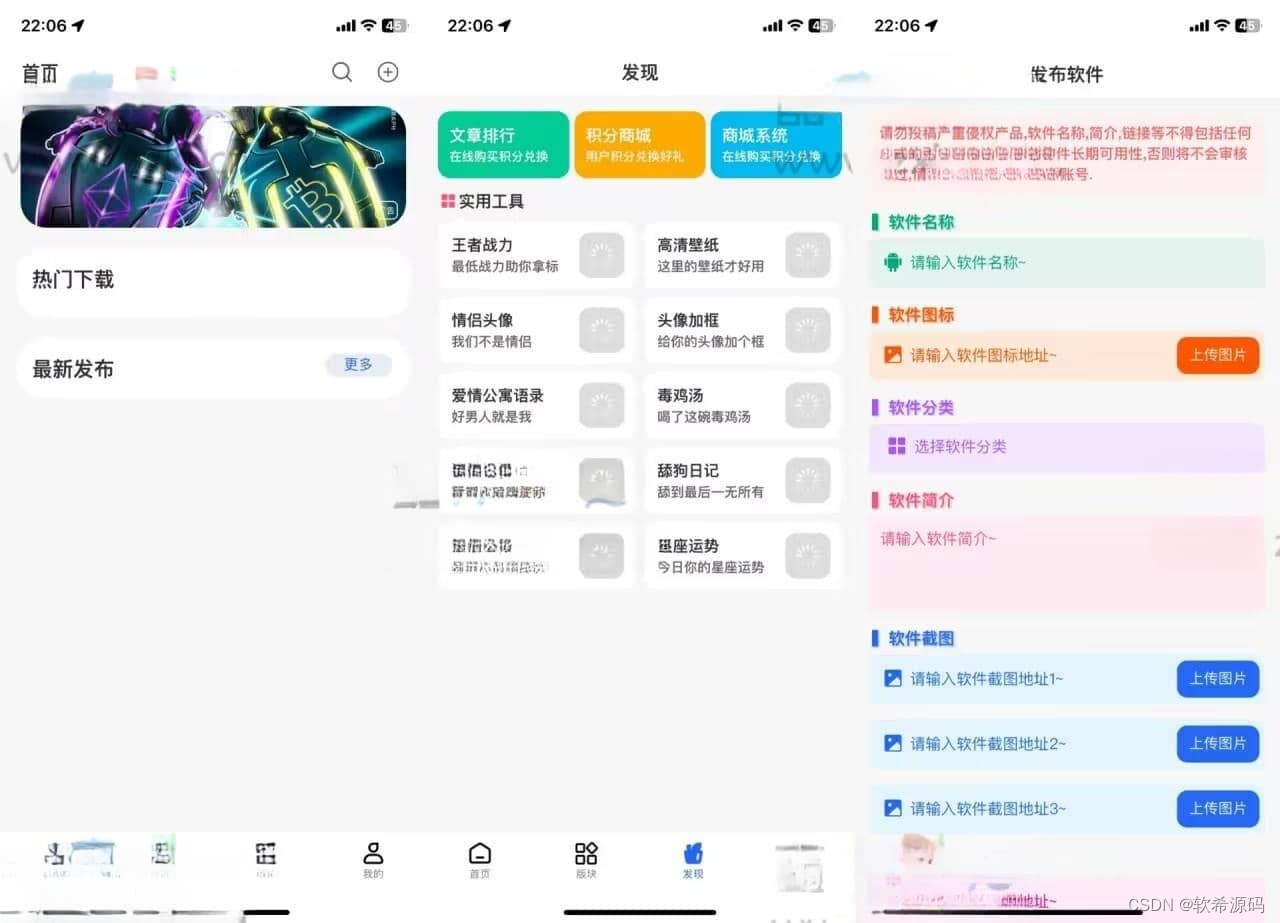
Uniapp软件库源码 全新带勋章功能(包含前后端源码)
Uniapp软件库全新带勋章功能,搭建好后台
在前端找到 util 这个文件 把两个js文件上面的填上自己的域名,
电脑需要下载:HBuilderX 登录账号 没有账号就注册账号,然后上传文件,打包选择 “发行” 可以打包app h5等等。…
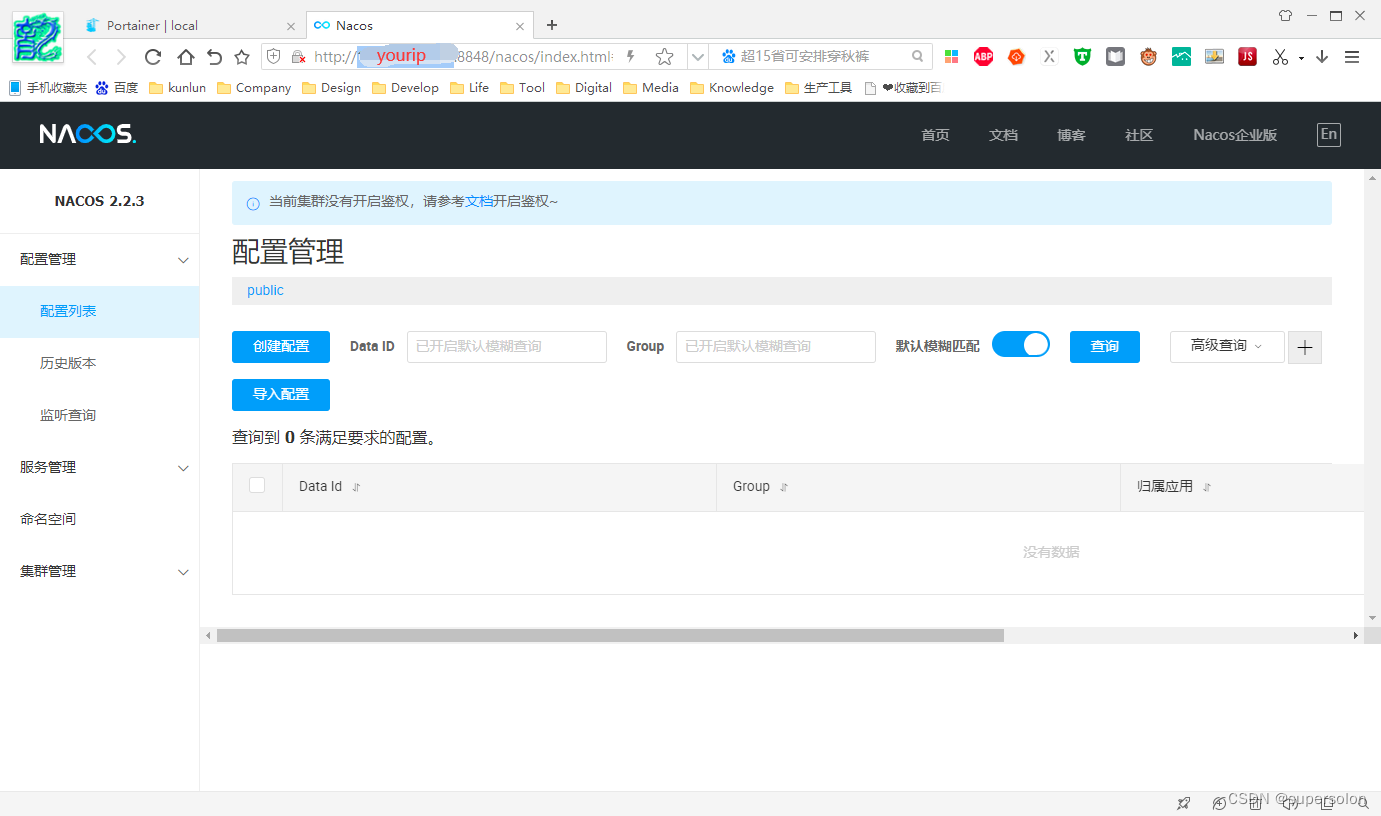
华为云HECS云服务器docker环境下安装nacos
华为云HECS云服务器,安装docker环境,查看如下文章。
华为云HECS安装docker-CSDN博客
一、拉取镜像 docker pull nacos/nacos-server二、宿主机创建挂载目录
执行如下命令: mkdir -p /usr/local/nacos/logs
mkdir -p /usr/local/nacos/con…
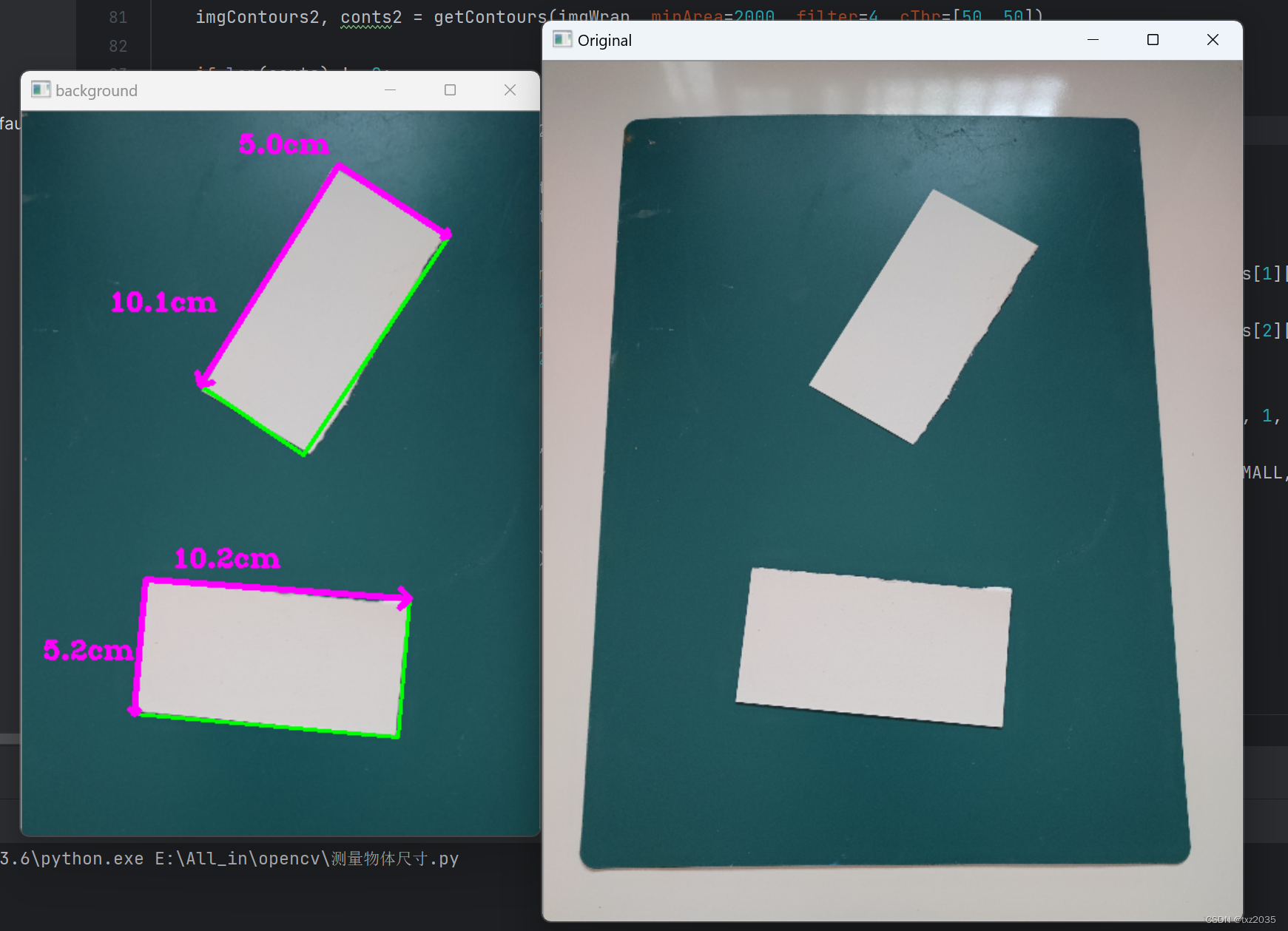
OpenCV实现物体尺寸的测量
一 ,项目分析
物体尺寸测量的思路是找一个确定尺寸的物体作为参照物,根据已知的计算未知物体尺寸。
如下图所示,绿色的板子尺寸为220*300(单位:毫米),通过程序计算白色纸片的长度。 主要是通过…
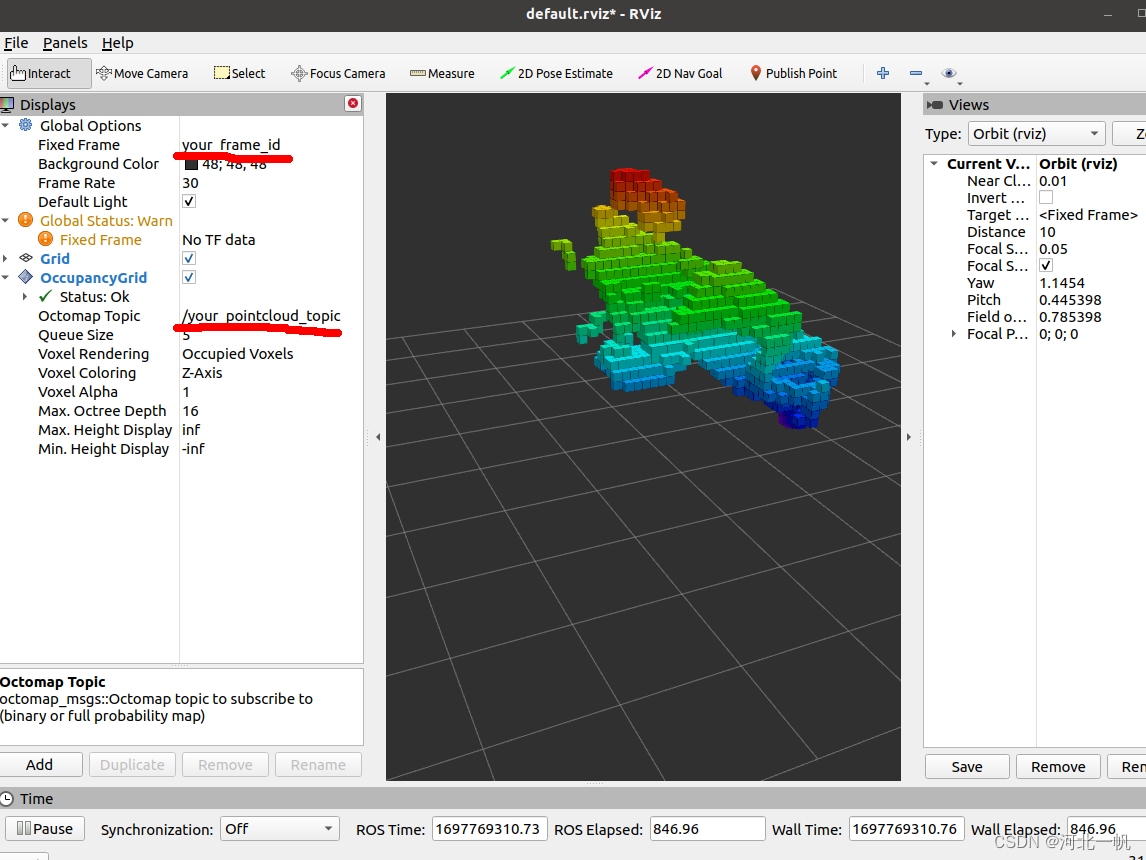
点云cloudpoint生成octomap的OcTree的两种方法以及rviz可视化
第一种:在自己的项目中将点云通过ros的topic发布,用octomap_server订阅点云消息,在octomap_server中生成ocTree
再用rviz进行可视化。
创建工作空间,记得source
mkdir temp_ocotmap_test/src
cd temp_ocotmap_test
catkin_make…

java-各种成员变量初始化过程-待完善
前置条件 一、本文章讨论的成员变量 public static final String aa "aa";public static final Integer bb 1;public static final Students cc new Students();public static String aa1 "aa";public static Integer bb1 1;public static String bb2…
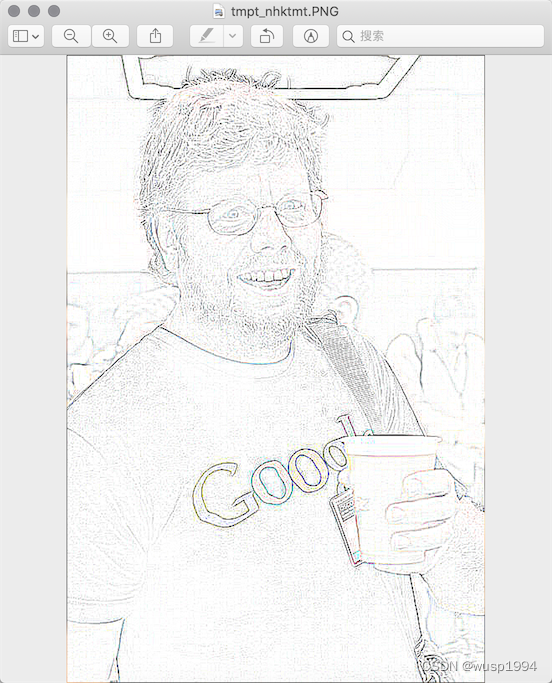
【Python】图像和办公文档的处理
图像和办公文档处理
用程序来处理图像和办公文档经常出现在实际开发中,Python的标准库中虽然没有直接支持这些操作的模块,但我们可以通过Python生态圈中的第三方模块来完成这些操作。
操作图像
计算机图像相关知识 颜色。如果你有使用颜料画画的经历&…
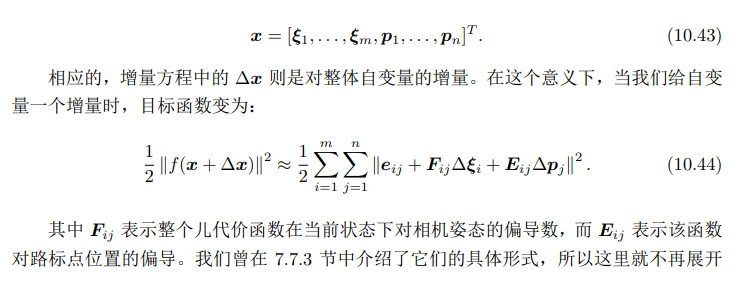
SLAM中相机姿态估计算法推导基础数学总结
相机模型
基本模型 内参 外参
对极几何
对极约束 外积符号 基础矩阵F和本质矩阵E 相机姿态估计问题分为如下两步: 本质矩阵 E t ∧ R Et^{\wedge}R Et∧R因为 t ∧ t^{\wedge} t∧其实就是个3x3的反对称矩阵,所以 E E E也是一个3x3的矩阵
用八点法估计E…

互联网Java工程师面试题·Java 总结篇·第十一弹
目录
90、简述一下你了解的设计模式。
91、用 Java 写一个单例类。
92、什么是 UML?
93、UML 中有哪些常用的图?
94、用 Java 写一个冒泡排序。
95、用 Java 写一个折半查找。 90、简述一下你了解的设计模式。 所谓设计模式,就是一套被…
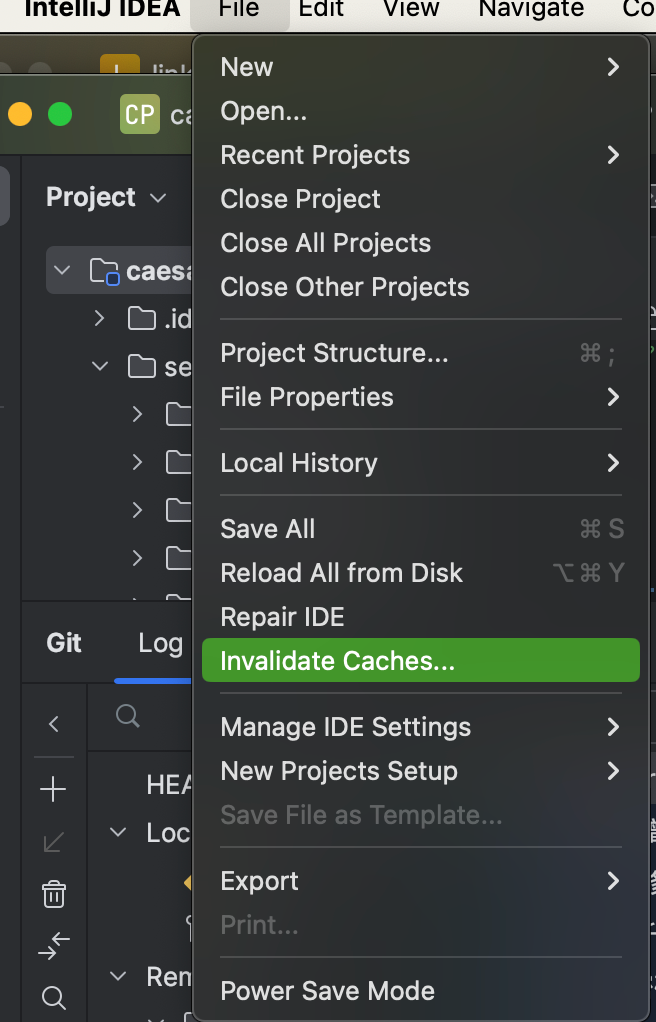
【工具-idea】git checkout error: unable to read askpass response
文章目录 一. 问题描述:二. 解决方案1. 方案一2. 方案二 一. 问题描述:
更新idea到2023.2版本之后,拉取公司内部代码出现如下报错: git checkout error: unable to read askpass responseerror: unable to read askpass response…