本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/284763.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章
网络基础【网线的制作、OSI七层模型、集线器、交换机介绍、路由器的配置】
目录 一.网线的制作
1.1.网线的标准 1.2.水晶头的做法
二.OSI七层模型、集线器、交换机介绍
集线器(Hub):
交换机(Switch):
三.路由器的配置 3.1.使用
3.2.常用的功能介绍
1、如何管理路由器
2、家…

JVM征服面试篇-亿及流量系统设计(学习笔记)
一、如何拆解亿级流量系统-百万级结算系统如何设置JVM
1.先确认如下问题: 2.第一步:确定业务背景和核心流程 3.第二步:确认系统的压力在哪里 3.第三步:确定QPS 4.第四步:确定单笔订单耗时,寻找性能瓶颈 5.…
ADC模拟/数字转换器
ADC是什么? 全称: Analog-to-Digital Converter ,指模拟 / 数字转换器 它是一种电子设备或电路,用于将连续的模拟信号转换为相应的数字形式,以便于数字系统进行处理。模拟信号是连续变化的,而数字系统则处…

Python 爬虫之下载视频(一)
爬取某平台视频 文章目录 爬取某平台视频前言一、大致内容二、基本思路三、代码编写1.引入库2.前期准备3.获取视频标题和地址3.下载保存视频 总结 前言
今天写个从好K视频平台爬取正在播放的视频,并下载保存到本地。
注意:建议大家先看看我之前的比较简…
UE5 runtime模式下自定义视口大小和位置并跟随分辨率自适应缩放
本文旨在解决因UI问题导致屏幕中心位置不对的问题 处理前的现象:如果四周UI透明度都为1,那么方块的位置就不太对,没在中心 处理后的现象: 解决办法:自定义大小和视口偏移 创建一个基于子系统的类或者蓝图函数库(什么类…

ros2机器人常规控制流程
The joint_state_publisher reads the robot_description parameter from the parameter server, finds all of the non-fixed joints and publishes a JointState message with all those joints defined.也就是说如果我们不需要控制机器人运动,只需要一个节点就可…
vue3使用mock模拟后端接口
安装mock axios
yarn add mock
yarn add axios
新建在src/mockdata/automenu.js 模拟后端的json数据格式
import Mock from mockjs
Mock.mock(/menu,get,{status: 200,menuList: [{id : 1,iconCls: "fa fa-window",name: 系统管理,url: /},{id: 2,icon: icon-j…
ASP.NET Core面试题之Redis高频问题
🎈🎈在.NET后端开发岗位中,如今也少不了、微服务、分布式、高并发高可用相关的面试题🎈🎈
👍👍本文分享一些整理的Redis高频面试题🎉
👍👍机会都是给有准备…
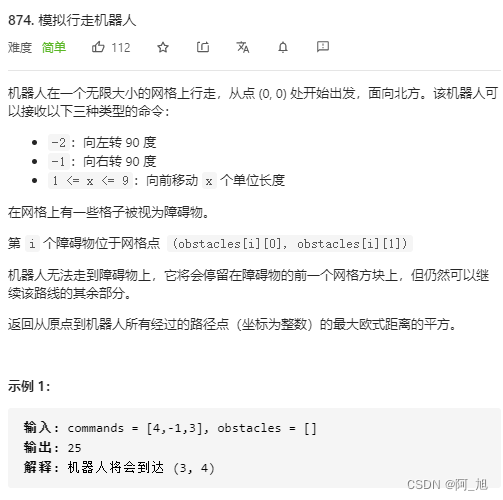
【经典LeetCode算法题目专栏分类】【第5期】贪心算法:分发饼干、跳跃游戏、模拟行走机器人
《博主简介》 小伙伴们好,我是阿旭。专注于人工智能AI、python、计算机视觉相关分享研究。 ✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~ 👍感谢小伙伴们点赞、关注! 分发饼干 class Solutio…
WPF仿网易云搭建笔记(7):HandyControl重构
文章目录 专栏和Gitee仓库前言相关文章 新建项目项目环境项目结构 代码结果结尾 专栏和Gitee仓库 WPF仿网易云 Gitee仓库 WPF仿网易云 CSDN博客专栏 前言
最近我发现Material Design UI的功能比较简单,想实现一些比较简单的功能,比如消息提示࿰…
信息收集 - 网站架构
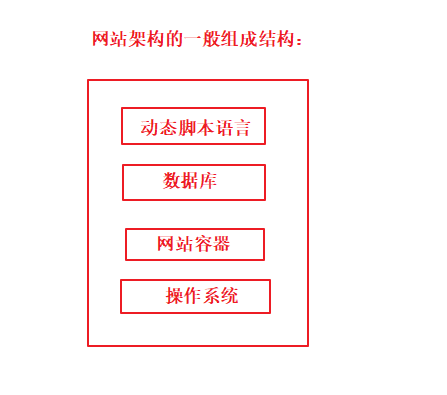
网站架构组成
通常,一个典型的网站架构包括以下组件: 动态脚本语言:动态脚本语言用于处理网站的逻辑和动态内容生成。常见的动态脚本语言包括PHP、Python、Ruby和Node.js等。这些脚本语言可以根据用户请求生成动态的网页内容。 数据库:数据库用于存储网站的数据,包括用户…
我的创作纪念日——成为创作者第1024天
机缘
一、前言
早上收到CSDN的推送信息,今天是我成为创作者的第1024天,回想起自己已经好久没有写博客了,突然间很有感触,想水一篇文章,跟小伙伴们分享一下我的经历。
二、自我介绍
我出生在广东潮汕地区的一个小城…
Unity的UI界面——Text/Image
编辑UI界面时,要先切换到2d界面 (3d项目的话) 1.Text控件
Text控件的相关属性:
Character:(字符) Font:字体 Font Style:字体样式 Font Size:字体大小 Line Spac…
C# NPOI导出dataset----Excel绘制Chart图表
仅限XLSX 2007以后版本(2007之前版本不支持) 1、判断文件夹是否存在,不存在则创建 //Application.StartupPath当前项目根目录 if (!Directory.Exists(Application.StartupPath "\Excel")) { …
P1297 [国家集训队] 单选错位
题意:有n个问题,每个问题有ai个答案,其中只有一个答案是正确的,现在有个人,做对了所有问题,但是他将他的所有答案都填入了下一个问题的位置,相应的,第n个问题的答案填入了第一个问题…
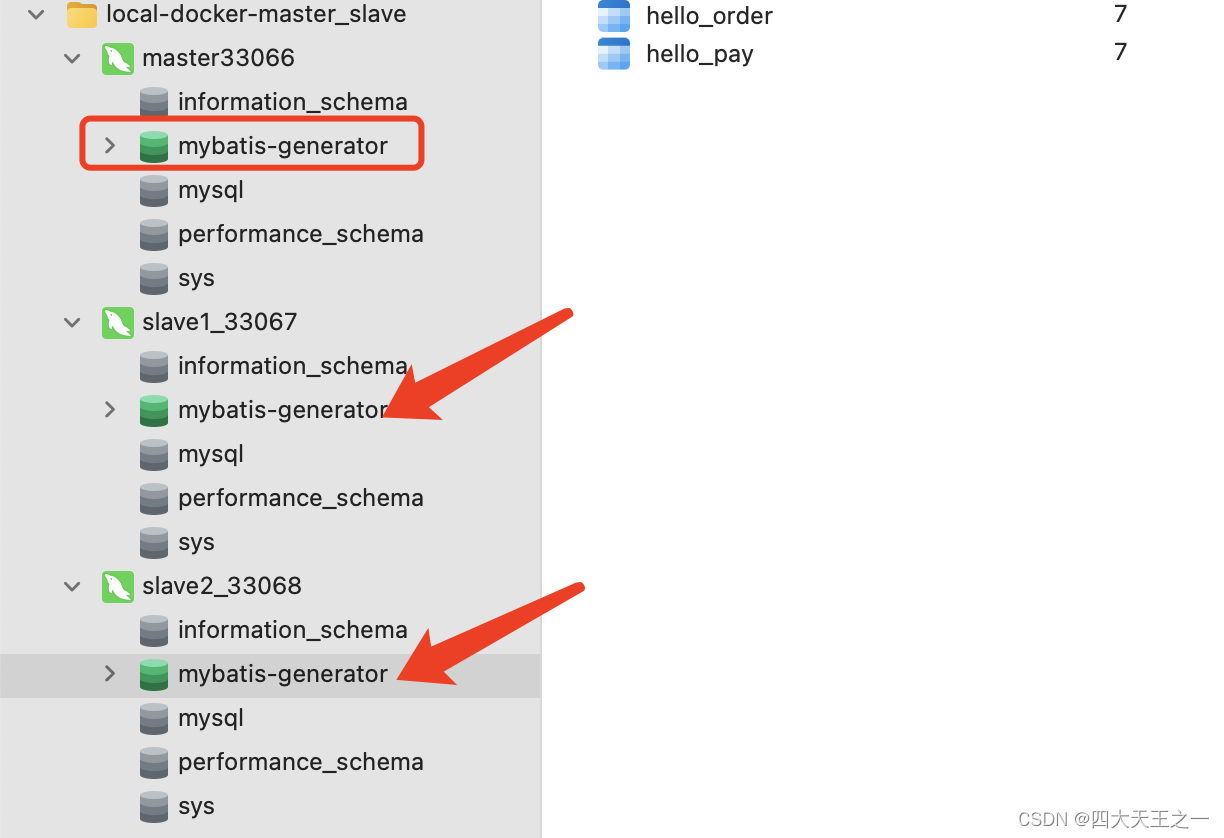
docker搭建mysql8.0.32,实现主从复制(一主两从)
安装docker的步骤、使用命令就不写了,本文章是基于会使用docker、linux基本命令的基础上来写的。 开始步骤:
1. 拉取 mysql 镜像
docker pull mysql:8.0.32
2. 启动容器并运行mysql a. 准备mysql的配置文件(该配置文件是:mysq…
TypeScript【泛型1、泛型2、声明合并、命名空间 、模块1、模块2、声明文件简介】(五)-全面详解(学习总结---从入门到深化)
文章目录
泛型1
泛型2
声明合并
命名空间 模块1
模块2
声明文件简介 泛型1 泛型(Generics)是指在定义函数、接口或类的时候,不预先指定具体的类型,而在使用的时候再指定类型的一种特性
首先,我们来实现一个函数…
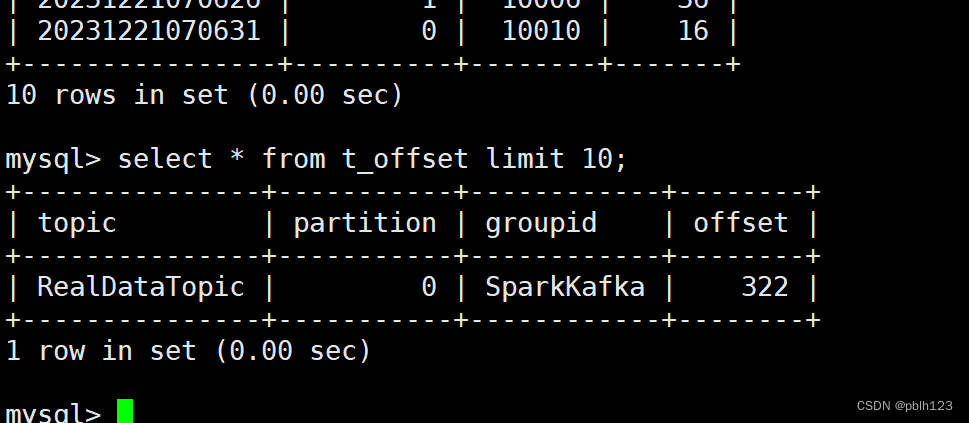
2023_Spark_实验三十二:消费Kafka数据并保存到MySQL中
实验目的:掌握Scala开发工具消费Kafka数据,并将结果保存到关系型数据库中
实验方法:消费Kafka数据保存到MySQL中
实验步骤:
一、创建Job_ClickData_Process 代码如下:
package examsimport org.apache.kafka.clien…
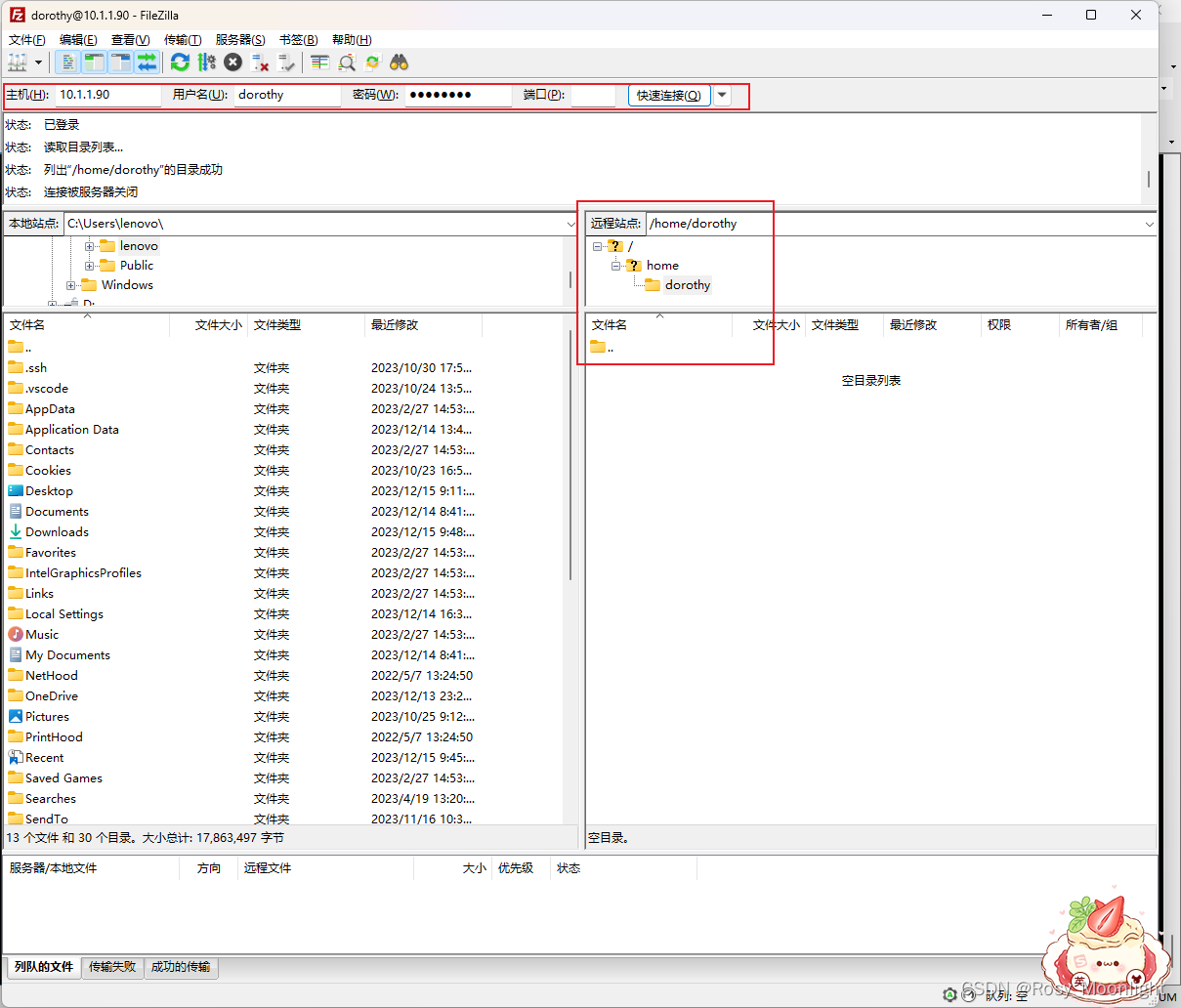
❀My虚拟机上的ftp服务器搭建(centos)❀
❀My虚拟机上的ftp服务器搭建(centos)❀
在CentOS上搭建FTP服务器可以使用vsftpd软件,下面是详细的搭建教程:
①安装vsftpd软件
在终端中输入以下命令进行安装:
sudo yum install vsftpd ②配置vsftpd
打开vsftpd的配置文件,…