本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.ldbm.cn/p/96975.html
如若内容造成侵权/违法违规/事实不符,请联系编程新知网进行投诉反馈email:809451989@qq.com,一经查实,立即删除!相关文章

LiveNVR监控流媒体Onvif/RTSP功能-支持数据库切换为高斯数据库信创瀚高数据信创数据库
LiveNVR监控流媒体Onvif/RTSP支持数据库切换为高斯数据库信创瀚高数据信创数据库 1、如何配置切换高斯数据库?2、如何配置切换信创瀚高数据库?3、RTSP/HLS/FLV/RTMP拉流Onvif流媒体服务 1、如何配置切换高斯数据库?
livenvr.ini -> [db]下…

财报解读:德尔玛净利润同比增长10.79%,自研将延续增长态势?
高成长性的小家电领域,近年来已成为家电行业的热门赛道。数据显示,我国小家电行业未来将保持6%-7%左右增速,预计2026年市场规模将接近6000亿元。在庞大的市场机遇中,德尔玛等后起之秀也频频迎来投资者关注。
从进行品牌设计&…
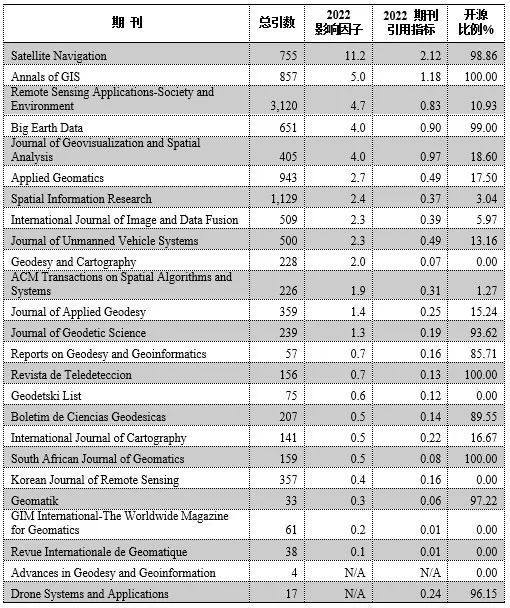
【前沿资讯】2023年最新遥感类SCIE/ESCI期刊影响因子汇总
6月28日,Clarivate发布了最新的JCR报告,公布了期刊的最新SCIE影响因子,并首次发布了ESCI期刊的影响因子。其中归入遥感“remote sensing”类的SCIE期刊有33本,归入ESCI期刊的有25本,以下分别为它们的相关指标。 表1 遥…

“多行业信赖选择:为什么出版、金融和教育都爱‘爱校对’“
在当今的数字时代,文本是我们沟通、传播知识和进行交易的主要工具。不论是出版行业的图书、金融行业的报告,还是教育行业的教材,文字的准确性都是不可或缺的。那么,为什么在这些关键行业中,“爱校对”成为了许多机构和…
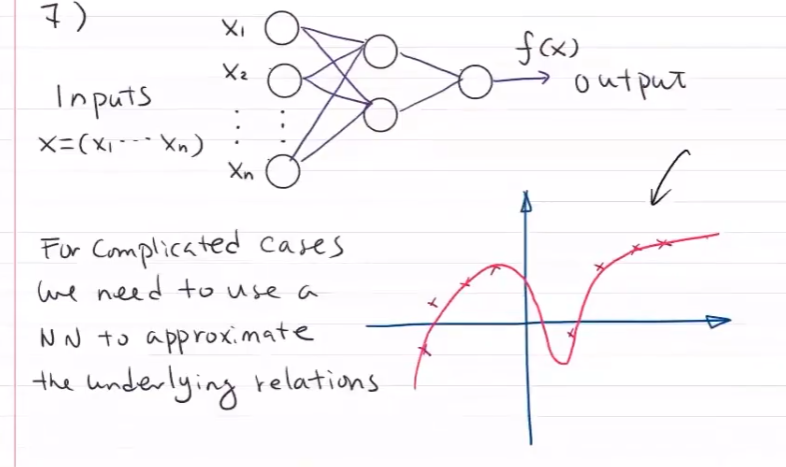
【AI】机器学习——绪论
文章目录 1.1 机器学习概念1.1.1 定义统计机器学习与数据挖掘区别机器学习前提 1.1.2 术语1.1.3 特点以数据为研究对象目标方法——基于数据构建模型SML三要素SML步骤 1.2 分类1.2.1 参数化/非参数化方法1.2.2 按算法分类1.2.3 按模型分类概率模型非概率模型逻辑斯蒂回归 1.2.4…
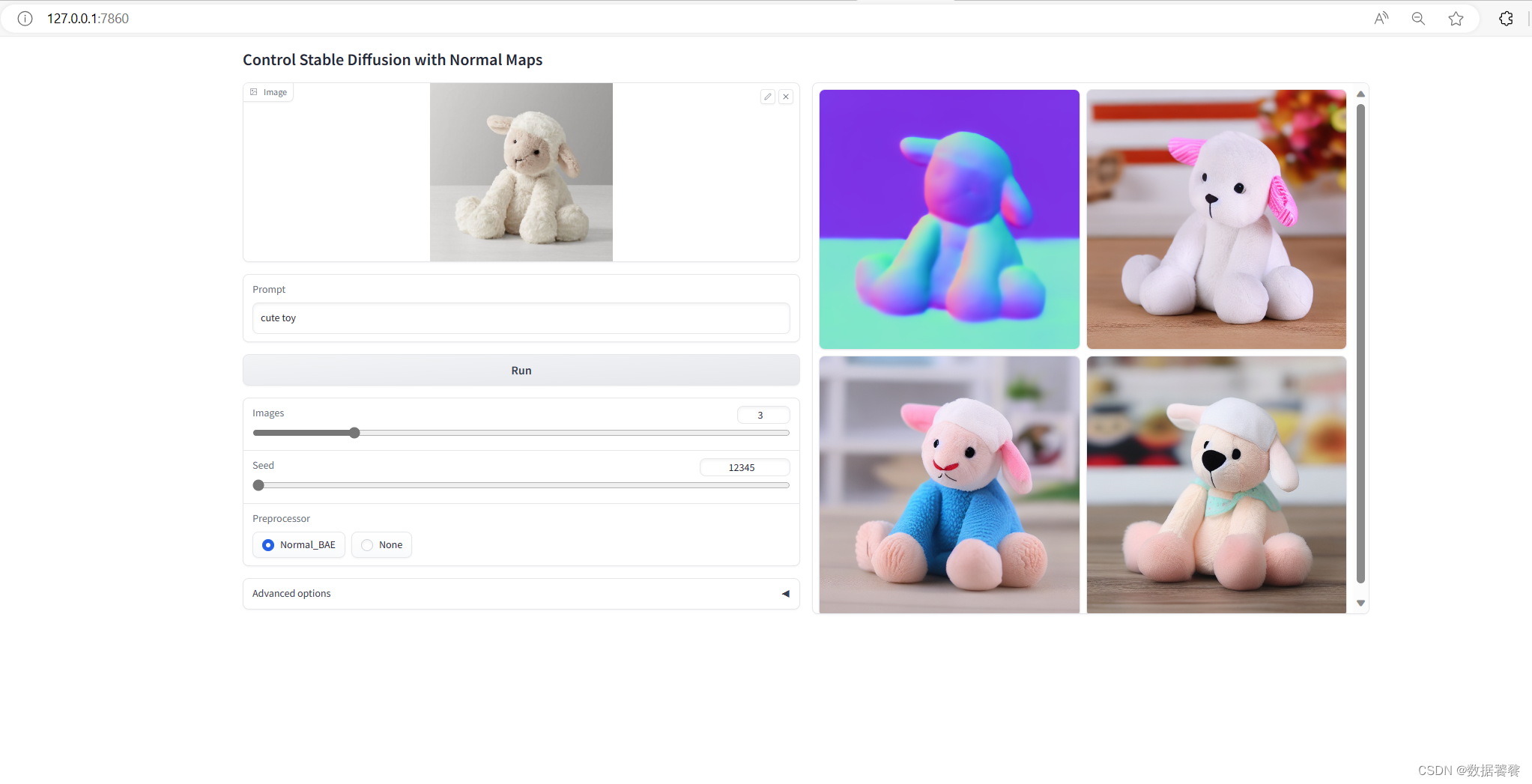
【AIGC专题】Stable Diffusion 从入门到企业级应用0414
一、前言
本文是《Stable Diffusion 从入门到企业级应用实战》系列的第四部分能力进阶篇《Stable Diffusion ControlNet v1.1 图像精准控制》的第0414篇 利用Stable Diffusion ControlNet 法线贴图模型精准控制图像生成。本部分内容,位于整个Stable Diffusion生态体…


数学建模--Seaborn库绘图基础的Python实现
目录
1.绘图数据导入
2. sns.scatterplot绘制散点图
3.sns.barplot绘制条形图
4.sns.lineplot绘制线性图 5.sns.heatmap绘制热力图 6.sns.distplot绘制直方图 7.sns.pairplot绘制散图 8.sns.catplot绘制直方图
9.sns.countplot绘制直方图
10.sns.lmplot绘回归图 1.绘图数…

VLAN间路由:单臂路由与三层交换
文章目录 一、定义二、实现方式单臂路由三层交换 三、单臂路由与三层路由优缺点对比四、常用命令 首先可以看下思维导图,以便更好的理解接下来的内容。
一、定义
VLAN间路由是一种网络配置方法,旨在实现不同虚拟局域网(VLAN)之…

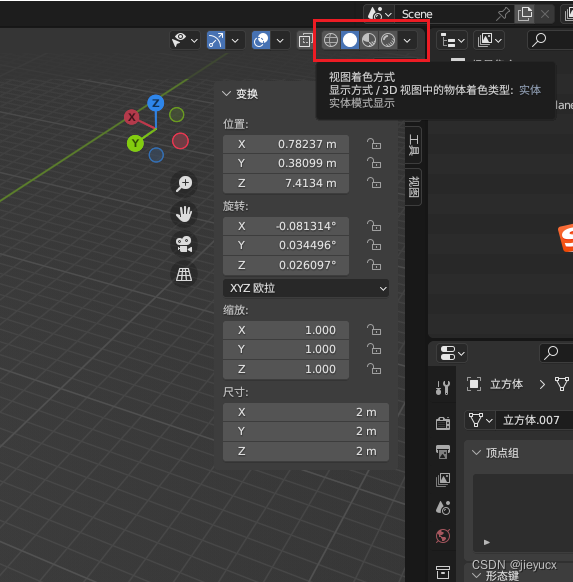
blender基本操作
文章目录 引言一、选择二、移动1. xyz轴移动2. xyz平面移动3. 精确移动4. 快捷键移动G 三、旋转四、缩放五、变换1. 变换坐标系2. 变换轴心: 六、吸附七、模式切换八、物体的合并和分离1. 合并2.分离 九、设置父子级关系十、叠加层和快速收藏夹1. 叠加层2. 快速收藏…
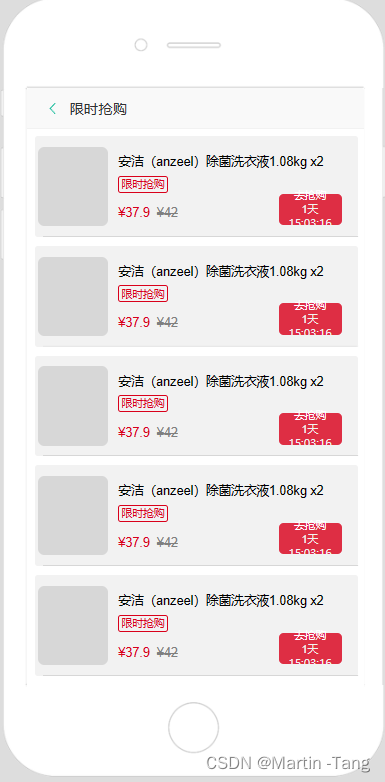
uniapp - 倒计时组件-优化循环时间倒计时
使用定时器的规避方法 为了避免定时器误差导致倒计时计算错误,可以采用一些规避方法,比如将倒计时被中断时的剩余时间记录下来,重新开启定时器时再将这个剩余时间加到新的计算中。同时,为了避免定时器延迟,可以在每次执…

【Apollo学习笔记】——规划模块TASK之PIECEWISE_JERK_SPEED_OPTIMIZER
文章目录 前言PIECEWISE_JERK_SPEED_OPTIMIZER功能简介PIECEWISE_JERK_SPEED_OPTIMIZER相关配置PIECEWISE_JERK_SPEED_OPTIMIZER流程QP问题的标准类型定义:优化变量设计目标函数约束条件相关矩阵二次项系数矩阵 H H H一次项系数向量 q q q设定OSQP求解参数 Process设…
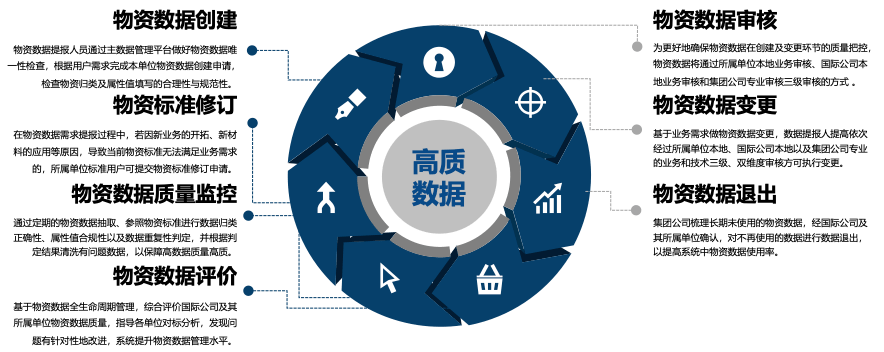
英诺森供应链一体化平台解析
近日,2023年中国物流与采购联合会科学技术奖正式公布,该奖项经国家科技部批准,在国家科学技术奖励工作办公室登记备案,是我国物流行业最具影响力的奖项之一。
英诺森联合客户申报的科技项目“英诺森供应链智能数据平台”…
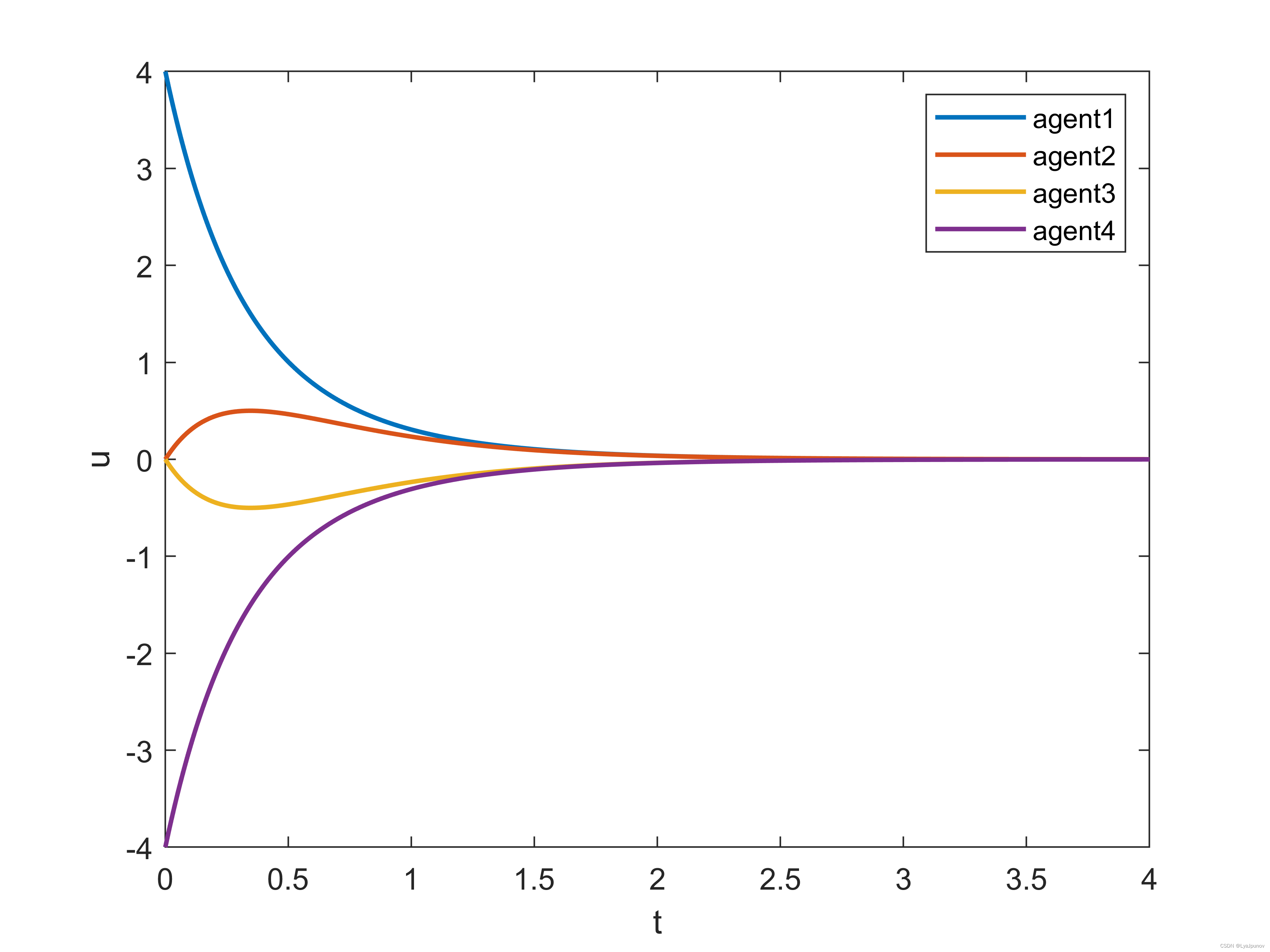
一阶多智能体的平均一致性
数学表达
一阶多智能体的运动学方程可以描述为 x ˙ i ( t ) u i ( t ) , i ∈ { 1 , 2 , 3 , … , N } \dot x_i(t) u_i(t),i\in\{1,2,3,\dots,N\} x˙i(t)ui(t),i∈{1,2,3,…,N} 其中 x i ( t ) x_i(t) xi(t)为状态, u i ( t ) u_i(t) ui(t)为控制量&…
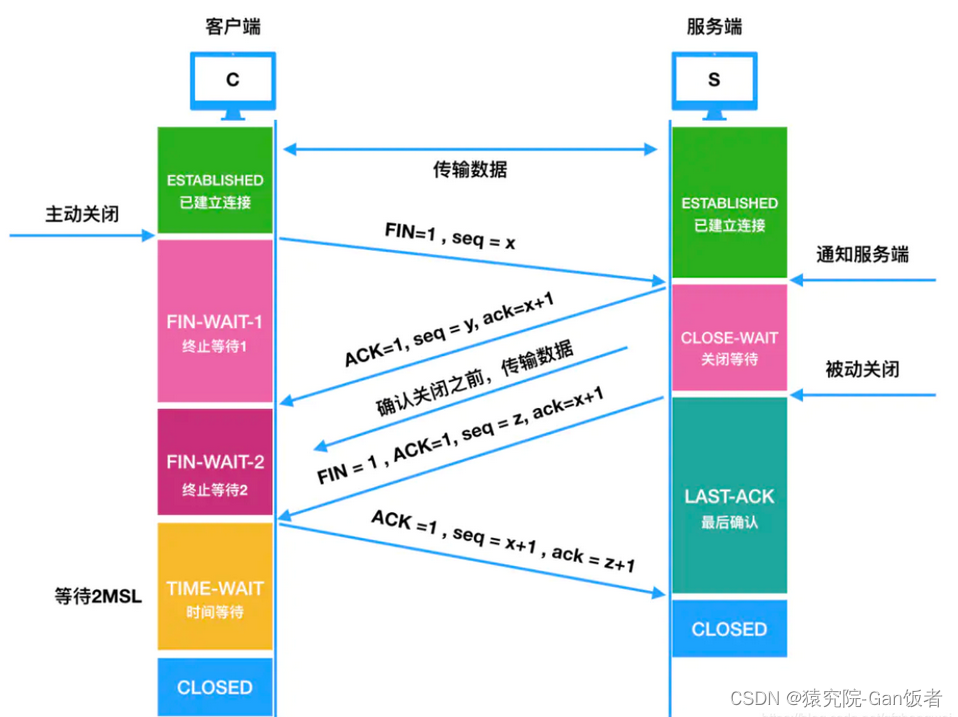
详解TCP/IP的三次握手和四次挥手
文章目录 前言一、TCP/IP协议的三次握手1.1 三次握手流程 二、TCP/IP的四次挥手2.1 四次挥手流程 三、主要字段3.1、标志位(Flags)3.2、序号(sequence number)3.3、确认号(acknowledgement number) 四、状态…
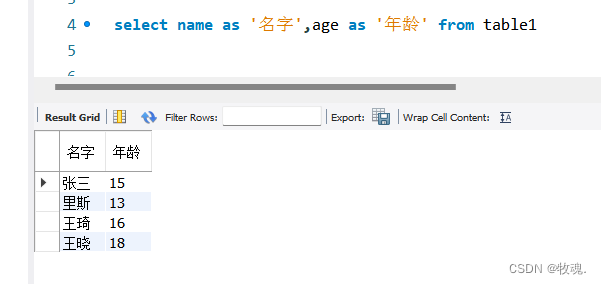
图解SQL查询之别名技巧:如何使用AS对列名进行更名
在 SQL 查询中,使用 {原始字段名} as {别名} 的语法来为查询结果的列赋予更直观的名称,以提高查询结果的可读性和可理解性。 以下是用到的表。 例如,查询表1的name字段,并将其更名为"名字",同时查询age字段并…
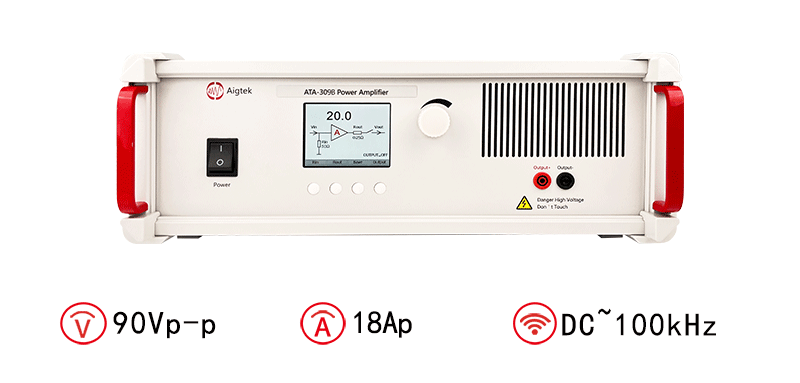
功率放大器主要作用是什么呢
功率放大器是一种电子设备,主要作用是将输入信号的功率增加到更高的水平,以便能够驱动高功率负载。在许多应用中,信号源产生的信号往往具有较低的功率,无法直接满足一些要求较高的设备或系统的需求。而功率放大器则可以增强信号的…

一文读懂GPU显卡的10个重要参数
在当今的高性能计算机世界中,GPU显卡的性能至关重要。这一领域的快速发展,使得图形渲染、游戏体验、视频编辑等高性能计算任务变得更加高效和流畅。正因如此,选择一款合适的GPU显卡变得越来越重要。在挑选GPU显卡时,了解其关键参数…